机器人零点
简介
机器人通过闭环伺服系统来控制各个轴的马达运动,控制器通过指令精确控制每一个马达的运行状态。马达上装配的脉冲编码器能够将马达的运行信号实时反馈给机器人控制器。在机器人运动过程中,控制器不断接收和分析编码器返回的信号,从而实现对机器人运动的精确控制。
控制器必须准确知道每个轴的零点位置,才能够正确分析编码器返回的位置信息。只有确定了零点基准,机器人在每次使用过程中才能保持位置的一致性和重复性。
零点数据的保存机制
在机器人正常使用过程中,零点位置和机器人的关节位置会被保存下来,并在控制器正常断电的情况下使用内部电池进行供电保持。
每次机器人正常关闭该数据会被保存下来,每次上电机器人会直接读取备份中的数据进行识别以保证和断电时状态一致。
机器人在经过撞击、电池掉电或长时间未使用等情况下,零点可能会偏移或者丢失。在这种情况下,机器人需要进行零点校准,以重新设定零点位置,确保机器人能够正常工作。
零点丢失的危害
当机器人在零点丢失的情况下继续工作时,会产生多种严重后果。
-
机器人各关节轴可能会工作超过软限位范围,这是十分危险的情况。
-
机器人无法到达指定位置,因为零点定位不同导致相同关节角情况下机器人末端位置不同。
-
机器人不能够沿着指定方向走指定长度(如无法准确走 1 米)。
-
在进行手眼标定等外部参数标定时,软件会根据标定算法计算出多个机器人需要到达的关键点位。在零点丢失的情况下,机器人往往无法准确到达这些点位,最终导致外参计算结果出现误差,影响机器人的抓取精度和作业质量。
零点检查方法
检测机器人零点是否丢失有多种方法,以下是两种最常用且有效的检测方法:
-
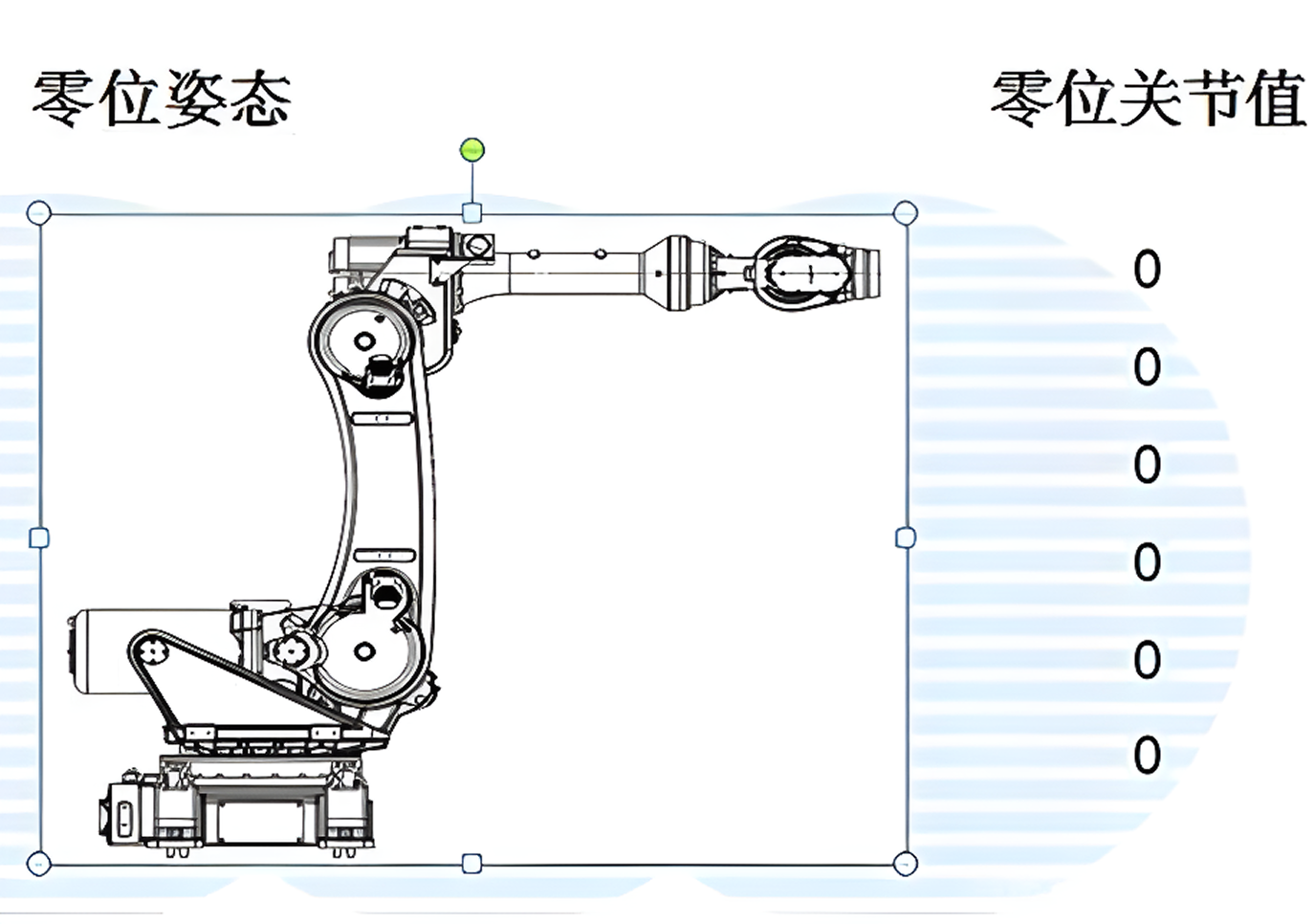
通过示教器将机器人所有轴角度调至 0°,再观察机器人各个轴上的铭牌是否对齐,若没有对齐则机器人零点丢失。
-
控制机器人沿着指定方向移动一段距离,观察机器人走动距离和理论距离是否一致。如果存在明显偏差,则可能存在零点问题。