参考坐标系
基础坐标系详解
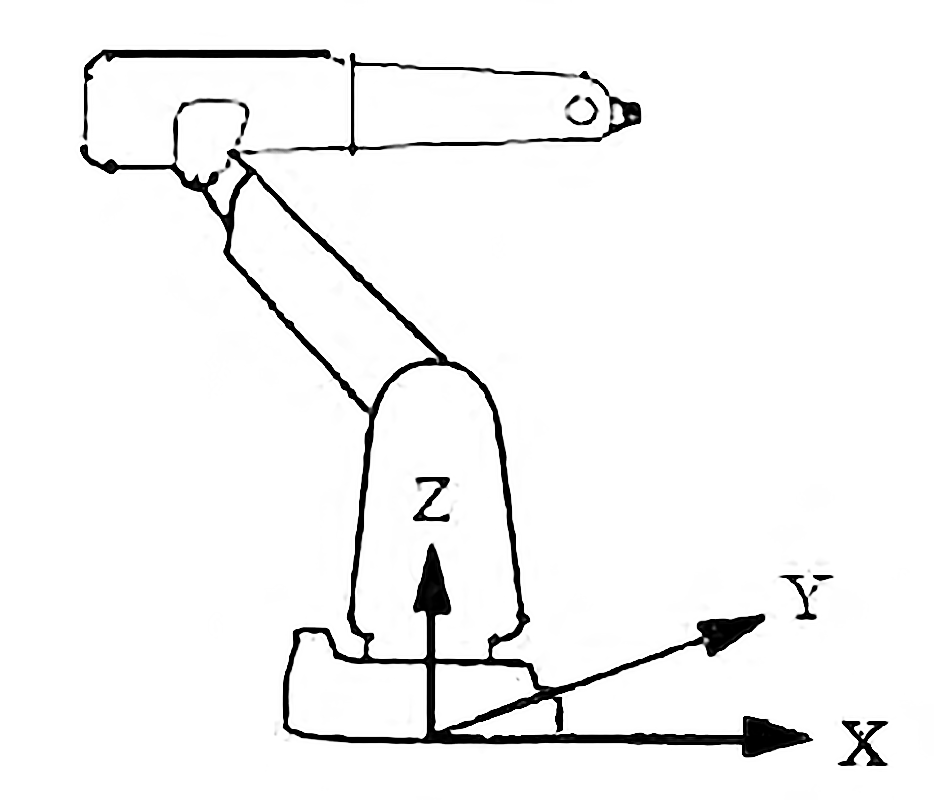
基坐标系
基坐标系是工业机器人的基础坐标系,代表机器人在空间中的绝对位置。如果工业机器人是安装在地面上,该坐标系大多数情况下位于底座上,原点位于机器人底座中心。XY平面与底座平面重合,通常X轴方向指向机器人"背面"方向,Z轴方向垂直向上。如果机器人是倒置安装的,那么Z轴指向下方。
坐标定义:
-
原点:位于机器人底座中心
-
XY平面:与底座平面重合
-
X轴方向:通常指向机器人"背面"方向
-
Z轴方向:垂直向上(正装)或向下(倒装)
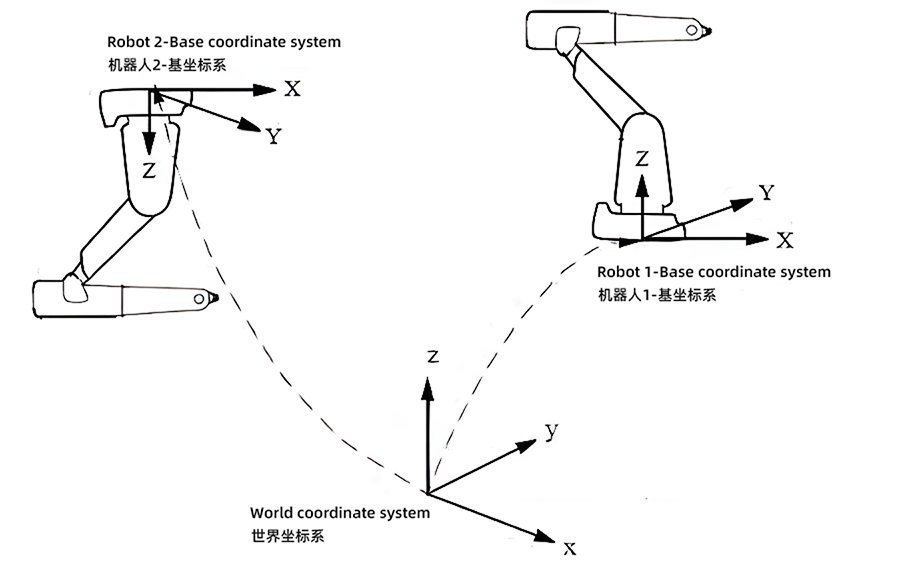
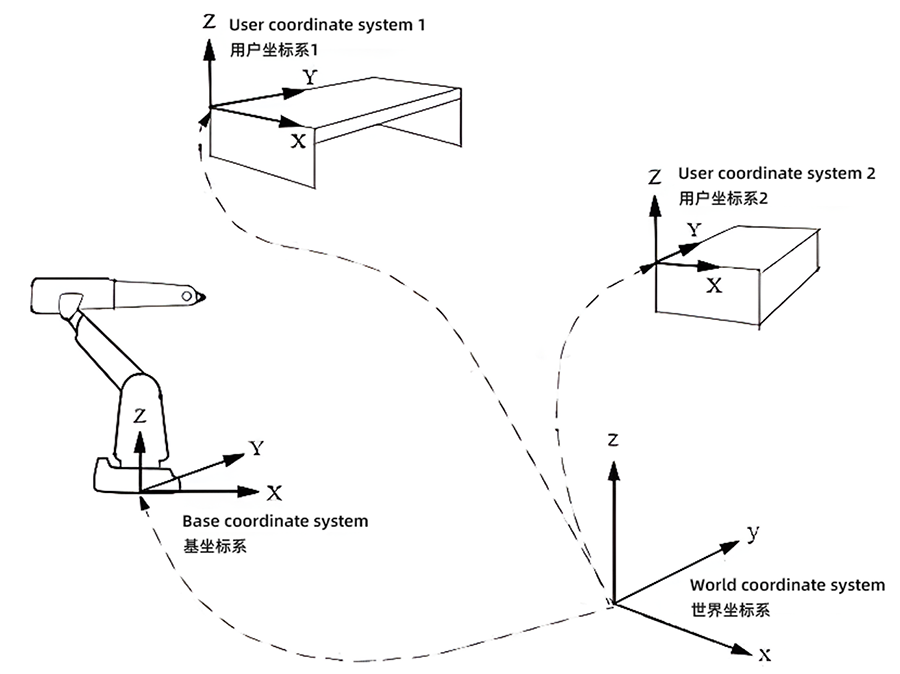
基坐标系作为机器人工作空间的绝对参考系,所有位置和姿态都相对于基坐标系定义。在简单的应用程序中,用户可以直接在基坐标系中对机器人动作进行编程。
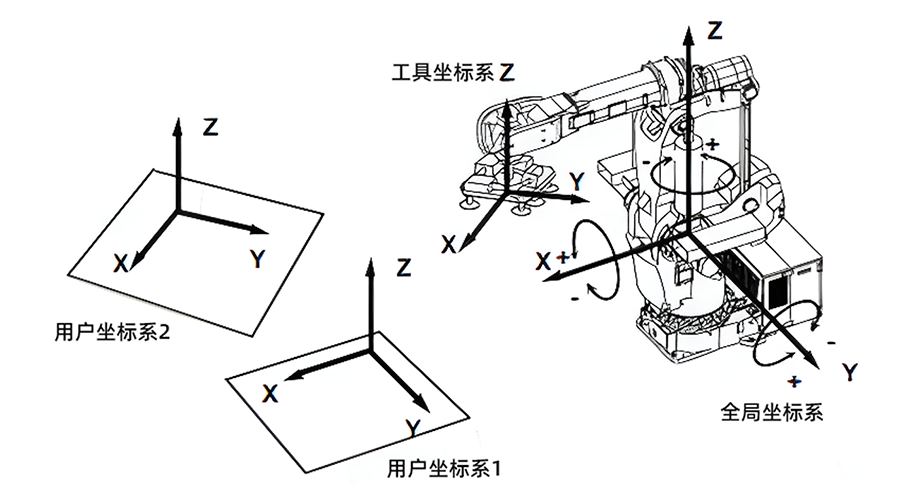
末端执行器相关坐标系
视觉系统坐标系
特殊应用坐标系
坐标系转换关系
在机器人视觉系统中,根据相机安装位置的不同,存在两种主要的手眼标定方式,对应不同的坐标系转换关系。
眼在手外标定是指相机固定在机器人工作空间外部,相机与机器人基座建立固定关系。在这种配置下,转换关系为相机坐标系与机器人基坐标系之间的转换,转换矩阵描述相机相对于机器人基座的位置和姿态。
眼在手上标定是指相机安装在机器人末端,随机器人运动。在这种配置下,转换关系为相机坐标系与机器人法兰坐标系之间的转换,转换矩阵描述相机相对于机器人法兰的固定位置和姿态。