工作空间
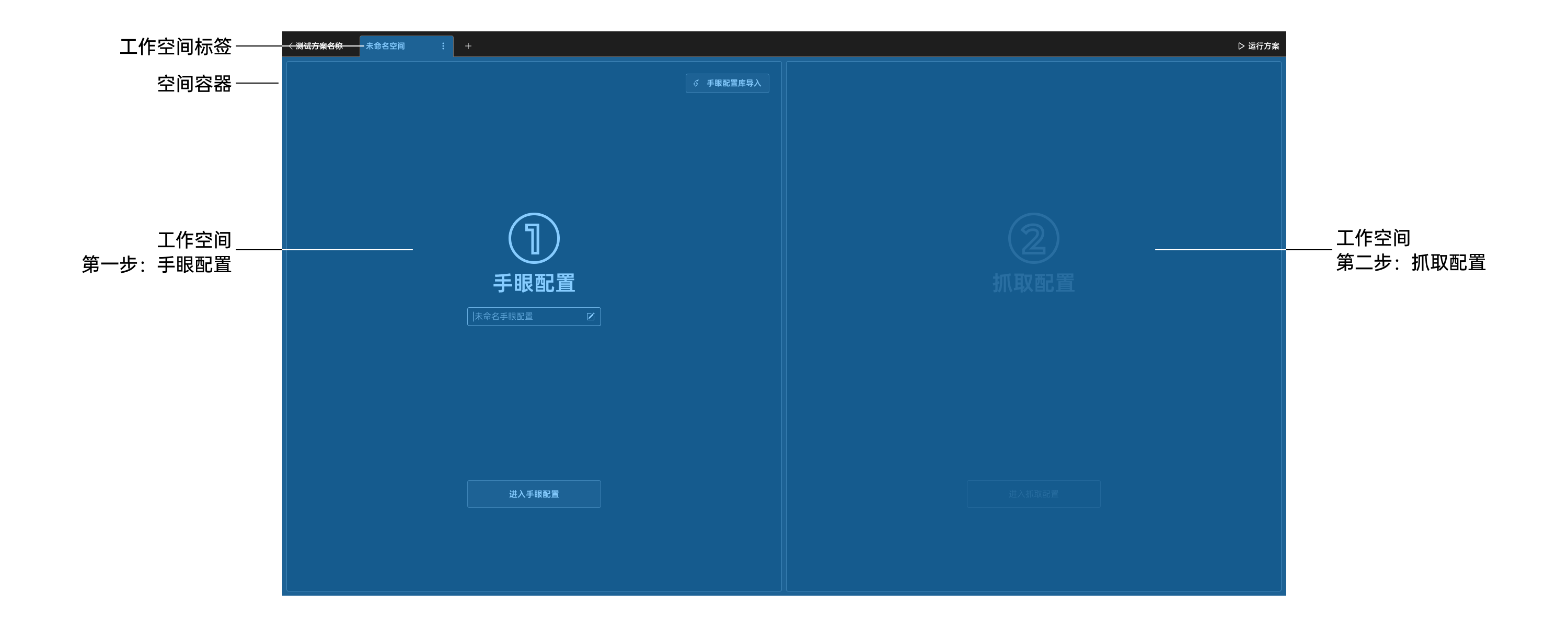
在项目方案中,工作空间指一个由手眼配置所决定的机器人执行抓取任务的三维区域。工作空间的目的是为机器人提供一个完整的操作环境,以确保机器人可以按照抓取配置执行任务。
在工作空间容器内可以对手眼配置和抓取配置进行设置,需要先完成手眼配置,再进行抓取配置。
一个项目方案中可以创建多个工作空间,且至少有一个工作空间。
在项目方案中,工作空间指一个由手眼配置所决定的机器人执行抓取任务的三维区域。工作空间的目的是为机器人提供一个完整的操作环境,以确保机器人可以按照抓取配置执行任务。
在工作空间容器内可以对手眼配置和抓取配置进行设置,需要先完成手眼配置,再进行抓取配置。
一个项目方案中可以创建多个工作空间,且至少有一个工作空间。