手眼配置
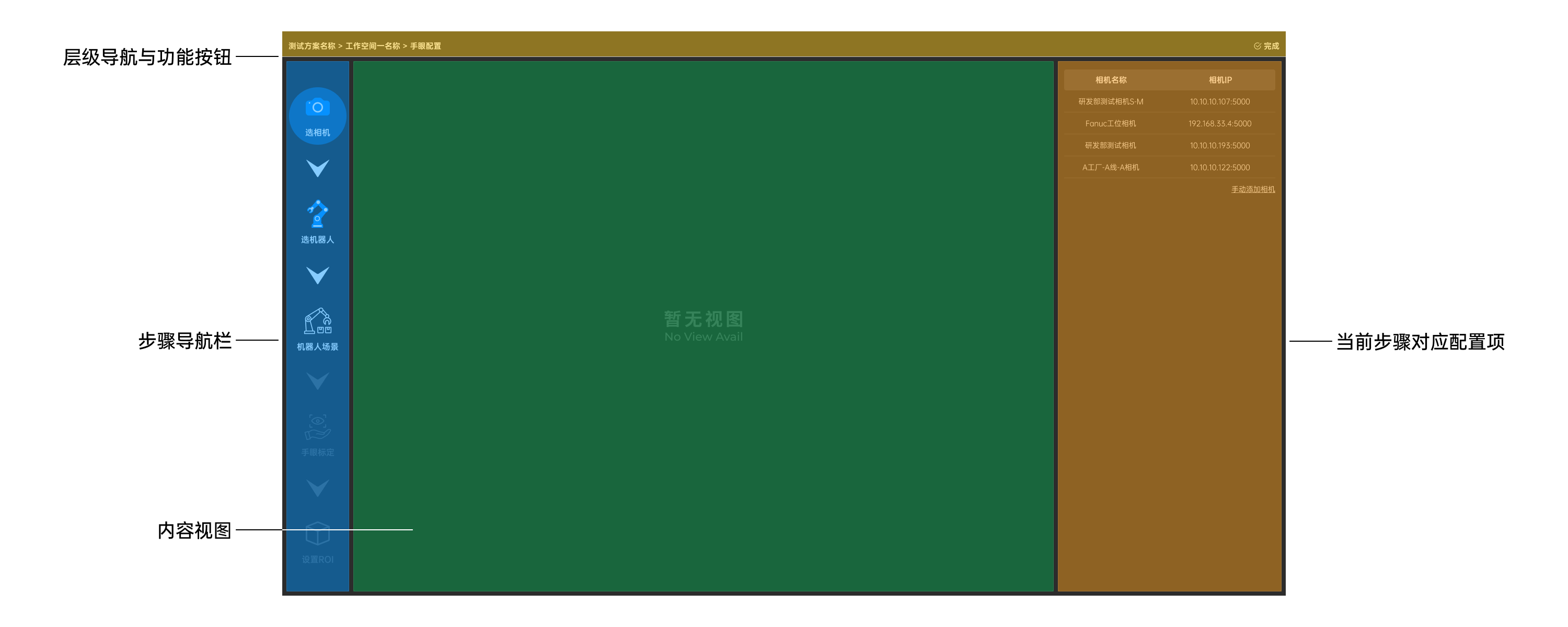
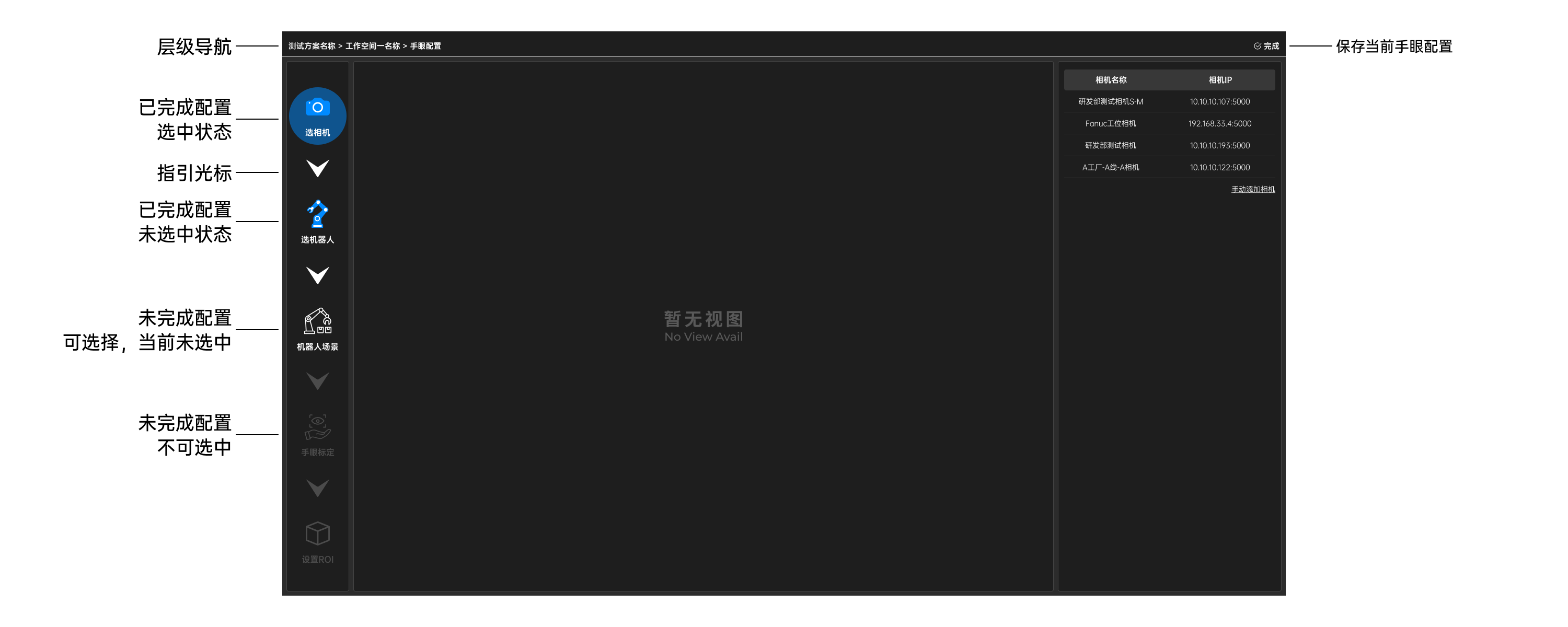
手眼配置指相机、机器人及其场景、手眼标定关系和 ROI 等组成的集合,用于描述相机与机器人之间的关系以及机器人在执行任务的区域,使相机与机器人协同工作实现精确的抓取操作。
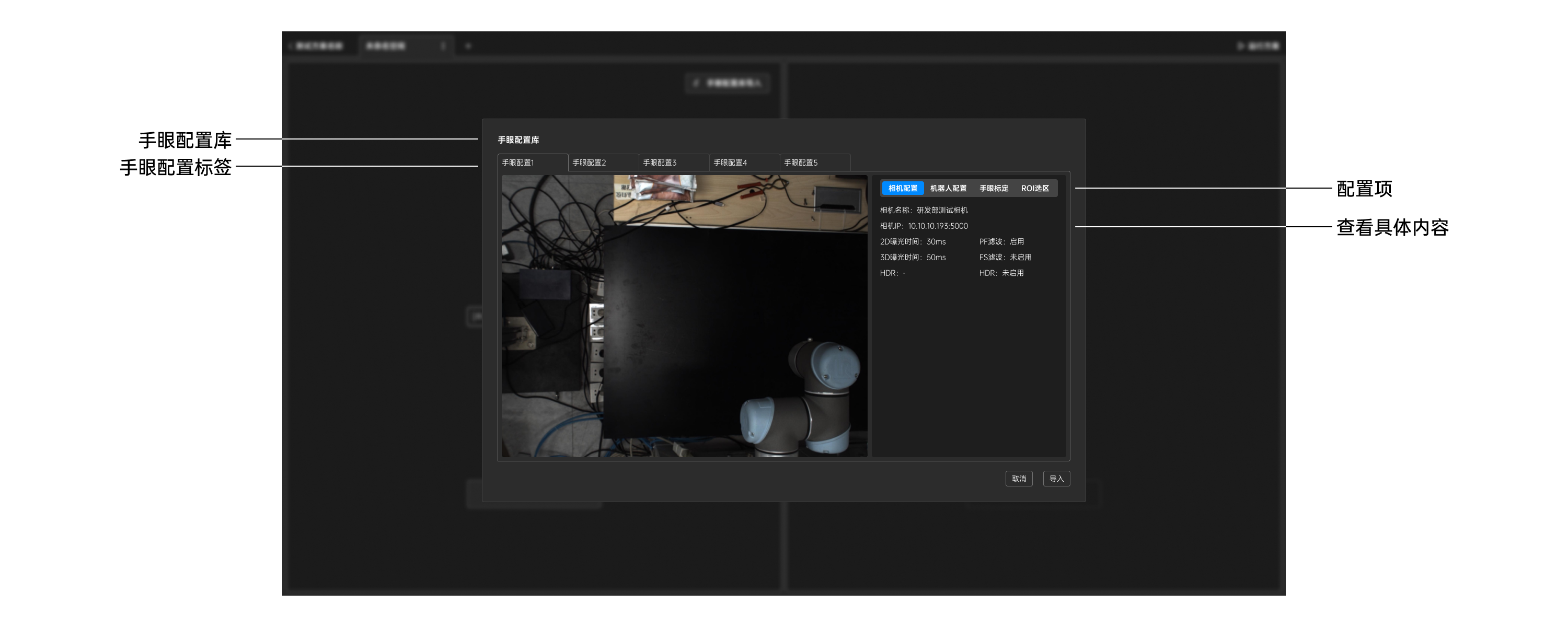
手眼配置将会自动存储在 手眼配置库,在库中可以便捷地进行编辑、管理以及在不同工作空间中复用。
手眼配置是工作空间配置的先导步骤。
手眼配置指相机、机器人及其场景、手眼标定关系和 ROI 等组成的集合,用于描述相机与机器人之间的关系以及机器人在执行任务的区域,使相机与机器人协同工作实现精确的抓取操作。
手眼配置将会自动存储在 手眼配置库,在库中可以便捷地进行编辑、管理以及在不同工作空间中复用。
手眼配置是工作空间配置的先导步骤。