手眼标定
完成机器人选择或机器人场景设置后,步骤导航光标将指引进行第四步配置,点击手眼标定进入手眼标定界面,依照标定流程完成手眼标定。
关于手眼标定
手眼标定指通过采集相机拍摄到的标定物位姿与机器人位姿,计算得到机器人坐标系与相机坐标系之间的转换关系。利用计算得到的转换矩阵,能够将相机坐标系下的目标点转换到机器人坐标系,从而实现机器人在3D视觉引导下的操作,因此手眼标定的精度至关重要,将直接影响系统的精度和稳定性。
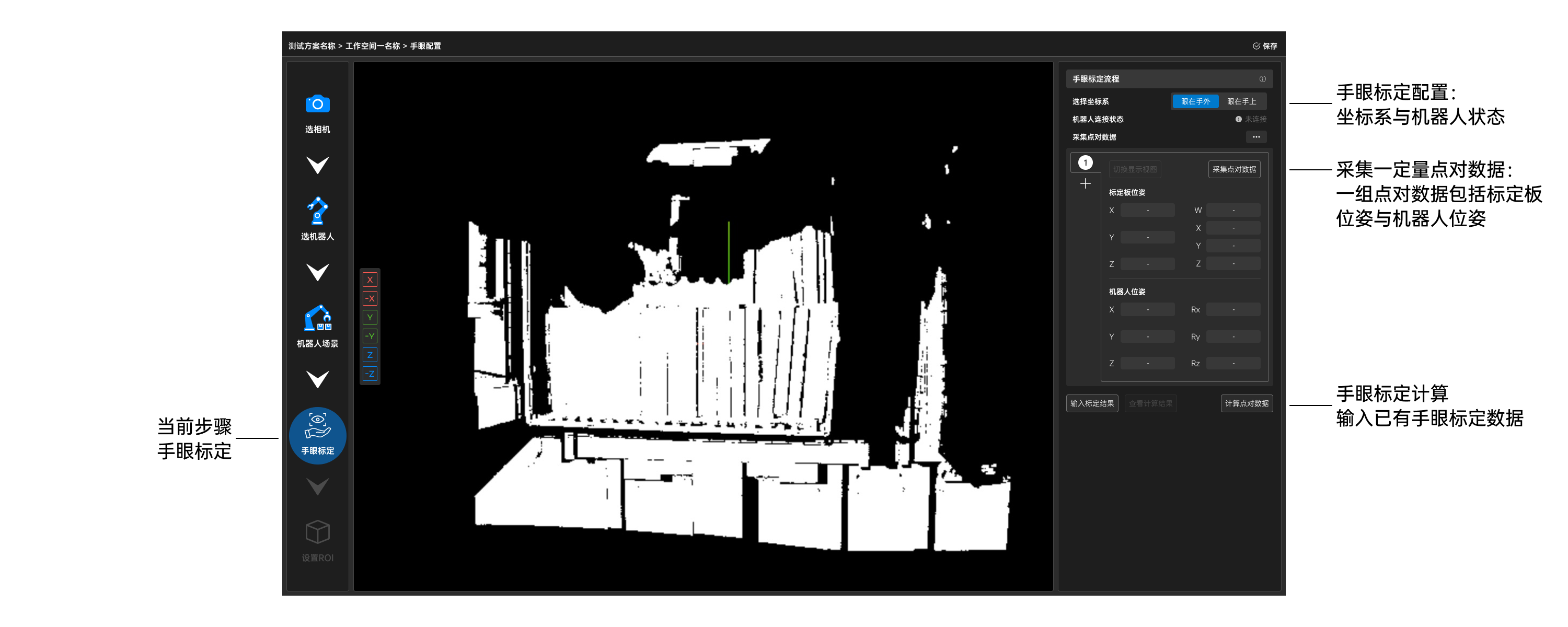
采集点对数据
点对数据指同一特征点分别在相机、机器人两个坐标系下的一对位姿信息。
获取点对数据
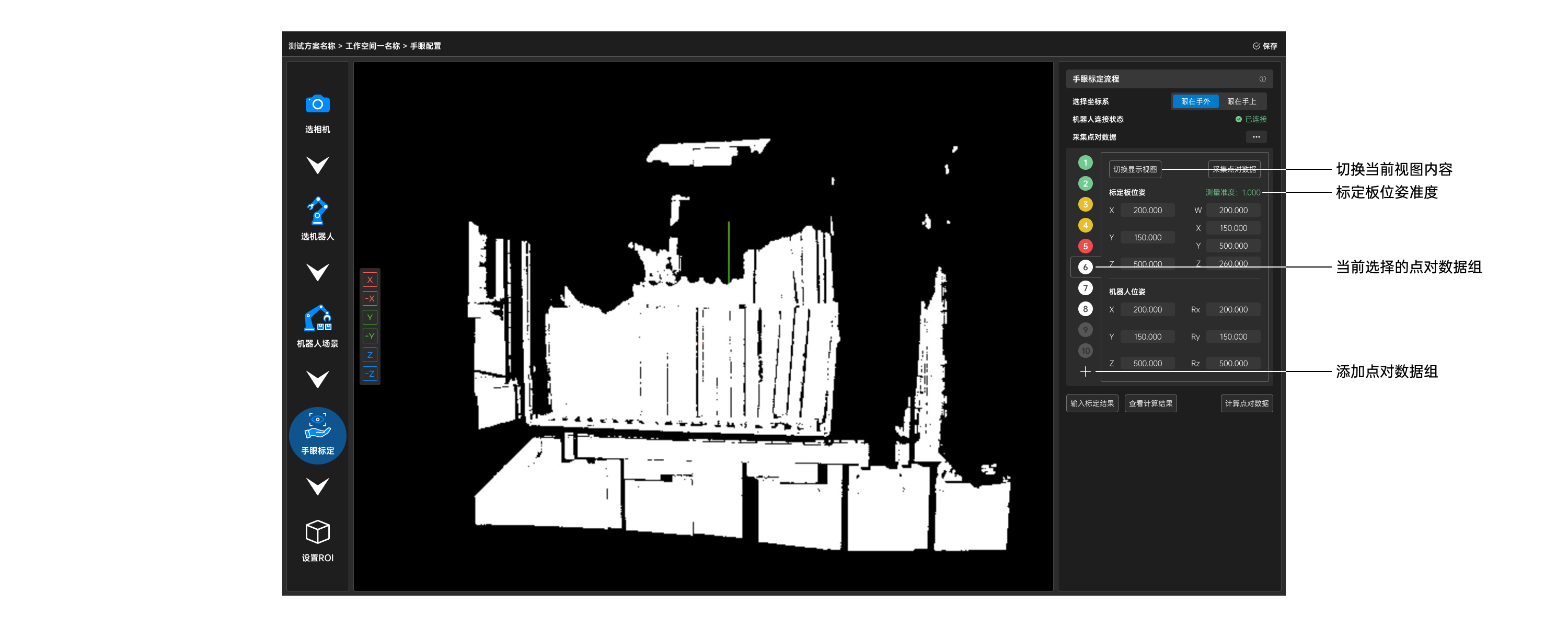
点击 采集点对数据 即可获取一组点对数据。当与机器人处于已连接状态时,采集点对数据将能够同时自动获取标定板位姿数据与机器人位姿数据;当处于未连接状态时,采集点对数据只能获取到标定板位姿数据,机器人位姿仍需要手动填写。
切换视图
点击 切换显示视图 即可切换 实时图像 与 采集图像。
实时图像 指相机实时图像。
采集图像 指在标定板存在时相机拍点云后采集到的3D数据转化成的2D图,该图可以很清晰的看到标定板识别结果,用以判断是否采集完整标定板,为什么采集失败等原因。

