场景设置
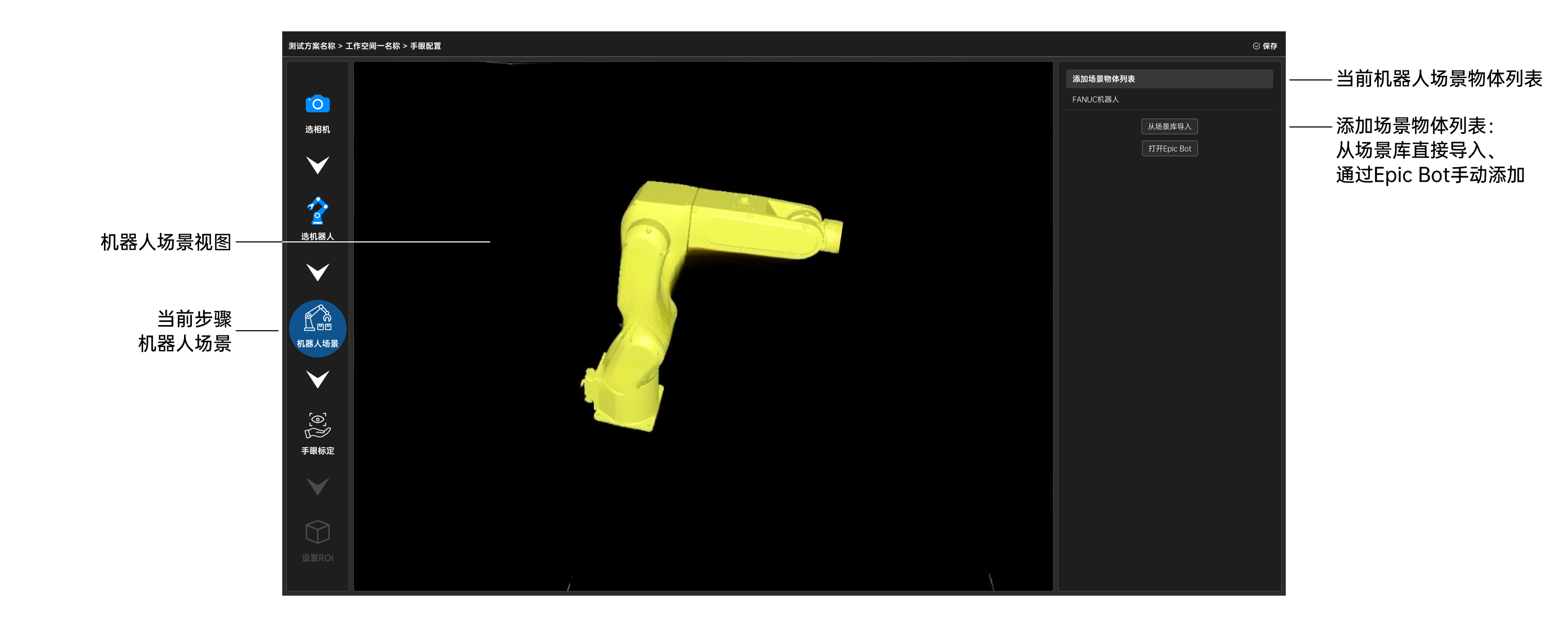
完成选机器人后,步骤导航光标将指引进行第三步配置,点击 机器人场景 进入搭建机器人场景界面。机器人场景并非必选步骤,因此可以选择跳过该部分,直接进行第四步手眼标定。
通过Epic Bot配置
点击 打开Epic Bot 可以通过 Epic Bot 来添加场景物体及进一步配置碰撞检测。
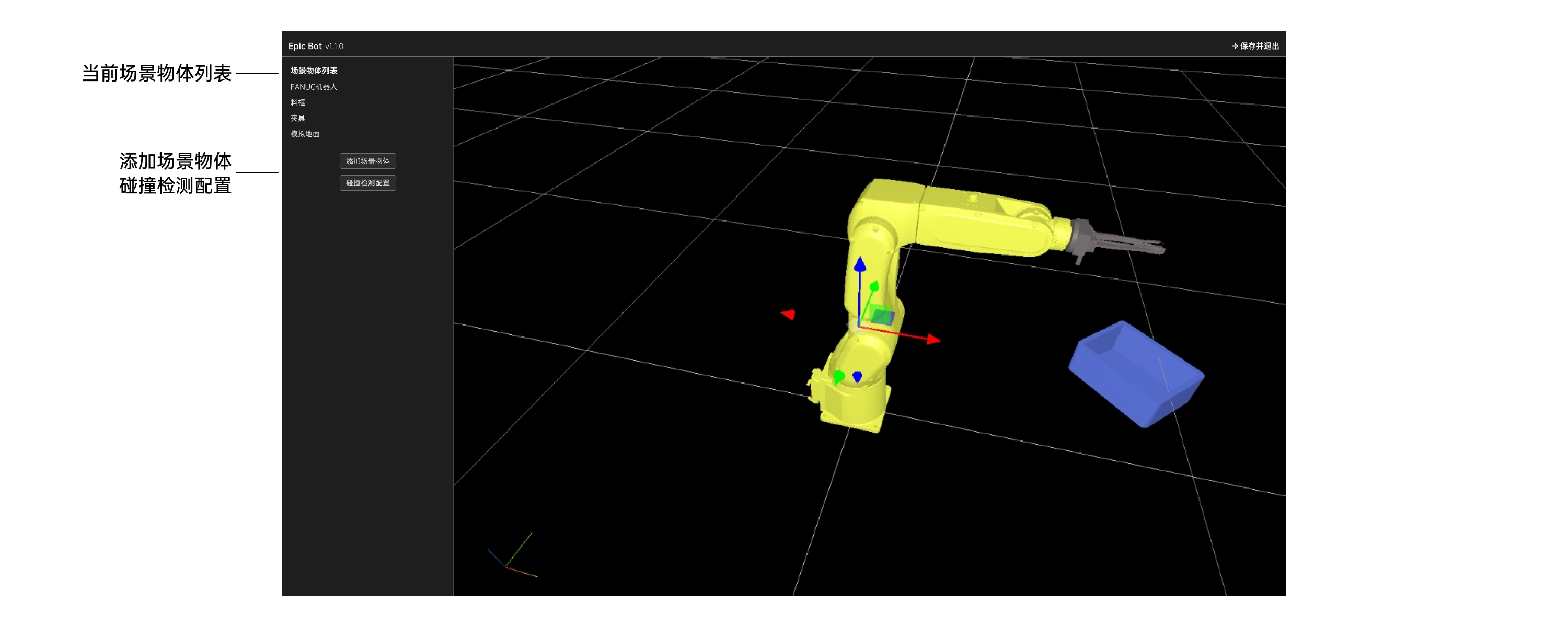
Epic Bot 的主要功能为对场景物体进行添加、修改、删除等操作,并且设置运行时的碰撞检测器和运动规划器的参数。
场景物体的操作
添加
支持添加机器人、工具模型、场景物体、点、文字标注等场景物体。
- 机器人
-
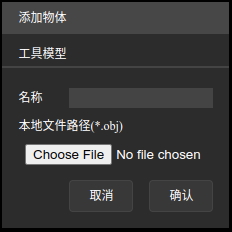
机器人一般不需要在 EpicBot 中手动添加,在选择机器人步骤已经选择具体的机器人品牌和型号。 - 工具模型
-
在
名称文本输入框中输入自定义工具名称,点击Choose File选择本地模型,然后点击确认即可添加工具到机器人末端。
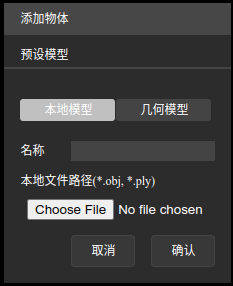
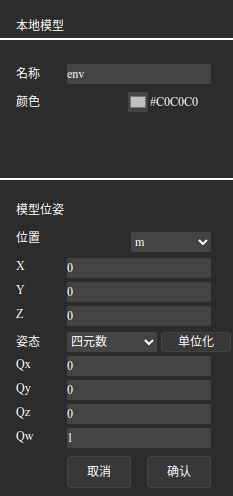
- 场景模型
-
在
名称文本输入框中输入自定义场景物体名称,点击Choose File选择本地模型,然后点击确认即可添加物体到场景中。
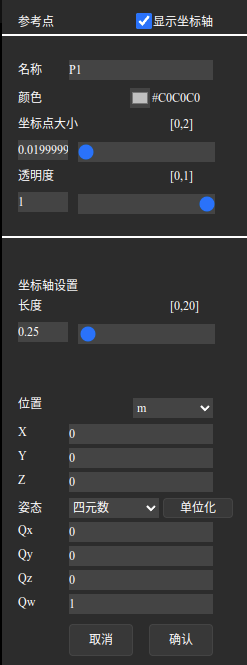
- 点
-
在
名称文本输入框中输入自定义点名称,然后点击确认即可添加一个点到场景中。
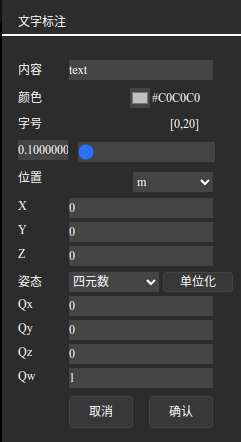
- 文字标注
-
在
内容文本输入框中输入文字,然后点击确认即可添加一个文字标注到场景中。
修改
- 机器人
-
在
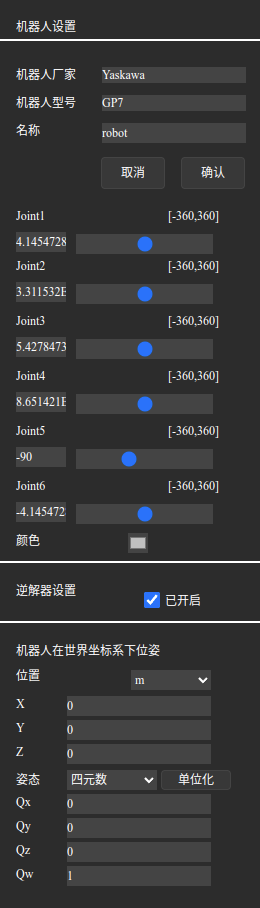
场景物体列表中选择机器人后,在软件的右侧会出现下图所示的机器人设置界面。可以调整机器人的颜色、机器人的关节角度、运动学逆解器的开始和关闭和基坐标系的位置。-
机器人的关节角度变化会改变机器人的姿态,进而改变
TCP在机器人坐标系下的位姿。可以通过修改关节角度到期望位置,与真实机器人进行对比。一般用来查看起始位置的机器人姿态和真实机器人是否有偏差。 -
逆运动学求解器开启后会在场景物体列表中增加
Dragger模型,点击该选项可以查看当前TCP在极坐标系下的位姿。可以配合点来设置运动规划器参数中的起始规划点,将机器人调整到期望的起始位姿,将Dragger的位姿复制到点的位姿。 -
默认位置:[0,0,0],默认姿态:[0,0,0,1],
机器人基坐标系默认与世界坐标系重合。一般情况下不需要修改机器人位置,修改后可能会导致碰撞检测发生错误,请慎重修改。
-
- 工具模型
-
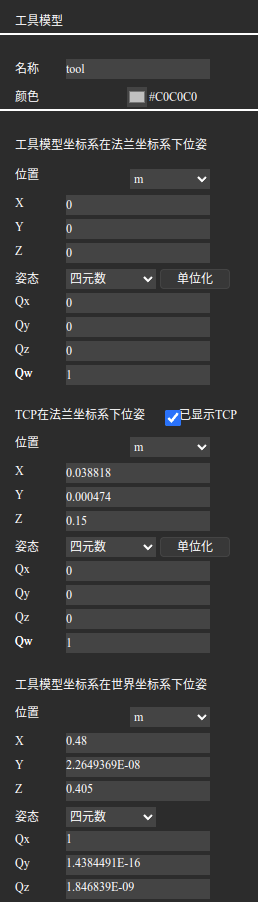
工具模型需要设置
工具模型坐标系在法兰坐标系下的位姿和TCP在法兰坐标系下的位姿两个位姿,默认位置:[0,0,0],默认姿态:[0,0,0,1]。-
工具模型坐标系在法兰坐标系下的位姿是工具安装到机器人末端后工具模型的本体坐标系在机器人末端的法兰坐标系下的位姿。 -
TCP在法兰坐标系下的位姿是工具坐标系在机器人末端的法兰坐标系中的位姿。一般情况下工具的本体坐标系都设置在与法兰坐标系重合的位置,工具模型坐标系在法兰坐标系下的位姿则可以保持默认值。TCP在法兰坐标系下的位姿一般通过真实机器人的示教器获取。
-
- 场景模型
-
场景模型可以修改名称、颜色和在世界坐标系下的位姿,默认位置:[0,0,0],默认姿态:[0,0,0,1]。
- 点
-
点可以修改名称、颜色、大小和透明度等属性,可以选择显示坐标系,并调节坐标轴的长度。也可以修改在世界坐标系下的位姿,默认位置:[0,0,0],默认姿态:[0,0,0,1]。点一般用来记录运动规划器的起始点位姿,可以通过真实机器人读取起始位姿数据,也可以通过开启机器人的逆解器并设置机器人的关节角度,然后使用Dragger的位姿进行设置。
- 文字标注
-
修改文字的内容、颜色、字号和位姿,默认位置:[0,0,0],默认姿态:[0,0,0,1]。
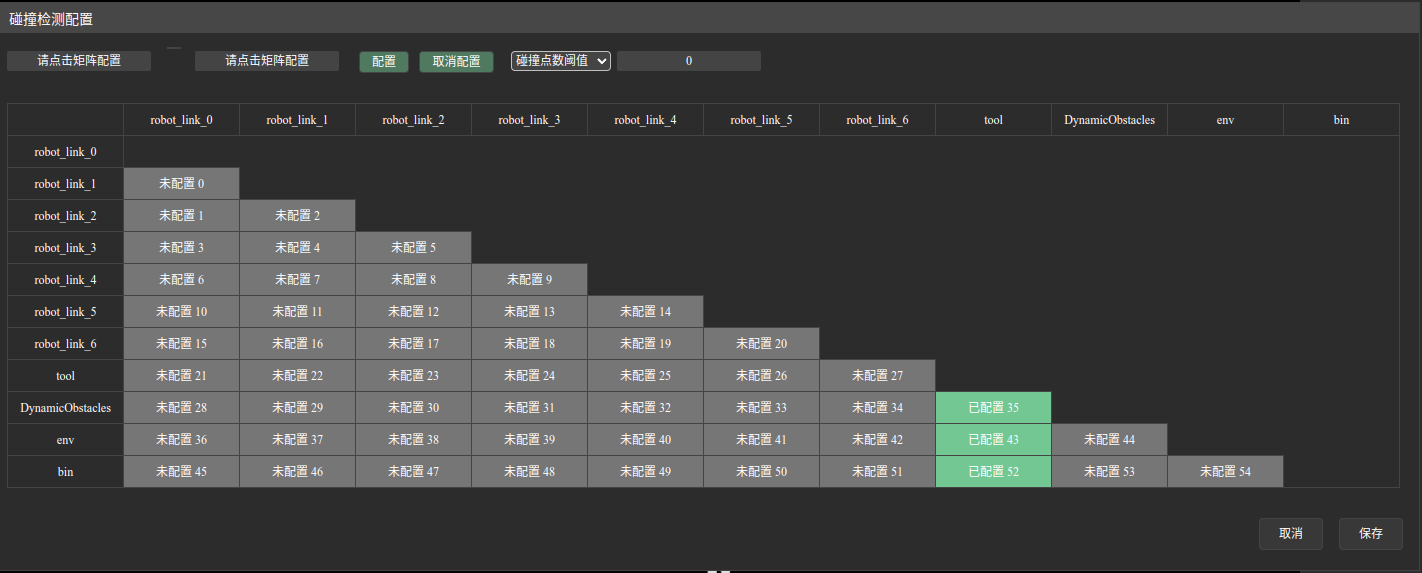
碰撞检测器参数设置
碰撞检测器的主要功能为检测多对物体之间是否发生了碰撞,设置原则为期望检查哪些物体对(碰撞检测对)之间的碰撞情况以及碰撞的评判标准(碰撞阈值)。碰撞检测器参数主要为碰撞检测对和其对应的碰撞阈值,如下图所示,碰撞检测对的设置通过选中两个物体对应的单元格,选择阈值类型并输入阈值,最后点击上方的配置即可完成一个碰撞检测对的设置。
已配置的碰撞检测对通过绿色进行显示,没有配置的碰撞检测对为灰色,可以通过取消配置来取消已配置的碰撞检测对。
例如设置tool和DynamicObstacles之间的碰撞检测,碰撞点数阈值为0,设置步骤为选中对应的单元格35,选择点数阈值,默认值即为0,最后点击配置,即可完成设置。
| 一般情况下选择碰撞点数阈值,碰撞检测速度快。 |
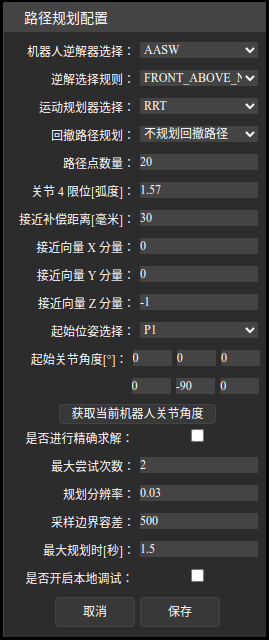
运动规划器参数设置
运动规划器参数说明:
-
机器人逆解器选择:
-
AASW——四五六轴相交的工业机器人
-
URs——类UR构型的协作机器人
-
-
逆解选择规则:用来筛选符合逆解规则的解
-
FRONT_ABOVE_NOFLIP——机器人朝向前方,肘部向上,不翻腕。工业机器人默认选择此选项,适用于大多数情况。
-
FRONT_ABOVE_FLIP——机器人朝向前方,肘部向上,翻腕
-
FRONT_BELOW_NOFLIP——机器人朝向前方,肘部向下,不翻腕
-
FRONT_BELOW_FLIP——机器人朝向前方,肘部向下,翻腕
-
BACK_ABOVE_NOFLIP——机器人朝向前后,肘部向上,不翻腕
-
BACK_ABOVE_FLIP——机器人朝向前后,肘部向上,翻腕
-
BACK_BELOW_NOFLIP——机器人朝向前后,肘部向下,不翻腕
-
BACK_BELOW_FLIP——机器人朝向前后,肘部向下,翻腕
-
JOINT_ANGLES——机器人关节角度。协作机器人默认选择此选项,适用于大多数情况,也可应用于工业机器人。
-
| 前8个选项对应于机器人的构型,与机器人的安装方式有关,如不清楚如何选择,请保持默认或咨询专业人员。第9个选项(JOINT_ANGLES)选择距离设置关节角度距离最近的一组解,也可以适用于工业机器人。 |
-
运动规划器选择:
-
RRT——Rapidly-exploring Random Trees,基于采样的运动规划算法,默认选项。
-
是否精确求解:开启后会强制规划器规划到精确的位置。
-
最大尝试次数:规划器的规划失败后重新规划直到超过最大尝试次数。
-
规划分辨率:采样点的分辨率,与起始点与目标点之间的距离成正比,推荐值0.05, 0.03, 0.01。
-
采样边界容差:起始点和规划点沿坐标轴向外扩展的距离,构成的立方体为采样空间。
-
最大规划时间:规划器单次规划的最长时间。
-
-
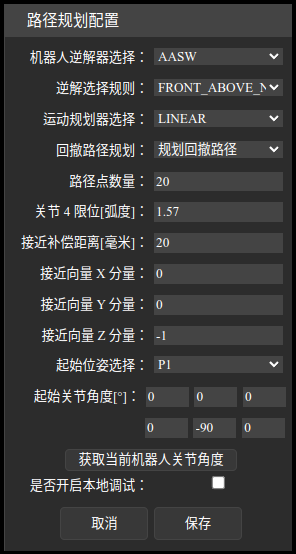
LINEAR——直线规划器,在起始点和规划点连线之间进行插值,并进行碰撞检测。
-
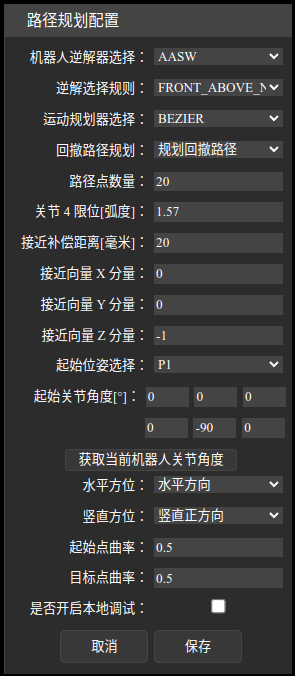
BEZIER——规划出一条Bezier曲线并进行插值。
-
水平方位:水平方向上接近目标点的方向,沿着起始点和目标点连线方向。
-
竖直方位:竖直方向上接近目标点的方向,分为竖直向上和竖直向下两个方向。
-
起始点曲率:Bezier曲线起始点附近的控制点相对于起始点和目标点之间距离的百分比。
-
目标点曲率:Bezier曲线目标点附近的控制点相对于起始点和目标点之间距离的百分比。
-
-
-
回撤路径规划:
-
不规划回撤路径——规划起始点到偏置目标点(预抓取点)的路径,对目标点进行碰撞检测。
-
回撤路径碰撞检测——规划起始点到偏置目标点(预抓取点)的路径,对目标点进行碰撞检测,然后将被抓取物体添加到工具上,对规划的路径点进行碰撞检测。
-
规划回撤路径——规划起始点到偏置目标点(预抓取点)的路径,对目标点进行碰撞检测,然后将被抓取物体添加到工具上,规划偏置目标点(预抓取点)到起始点的路径。
-
-
路径点个数:规划器输出路径的点数。如果规划回撤路径,则总路径点数为设置值的 2 倍。
-
关节 4 限位:关节 4 在路径中单次移动的最大距离。
-
接近补偿距离:预抓取点与抓取点之间的偏置(相对于抓取点)。
-
接近向量:预抓取点与抓取点之间偏置的方向(相对于抓取点)。
-
X分量——偏置方向向量的 X 坐标。
-
Y分量——偏置方向向量的 Y 坐标。
-
Z分量——偏置方向向量的 Z 坐标。
-
-
起始位姿选择:场景中添加的目标点。
-
起始关节角度:起始位姿对应的机器人关节角度。如果将机器人关节角度已经设置到起始位姿,可以通过
获取当前机器人关节角度按键将当前机器人关节角度设置为起始关节角度。
| 机器人逆解器和逆解选择规则根据真实机器人进行设置,剩余参数除起始位姿和起始关节角度外一般情况下默认值即可。 |
特殊说明
配置了动态障碍物的碰撞检测后需要注意:
-
动态障碍物的生成依赖被抓取物体模型,在抓取配置设置中没有设置碰撞检测模型时,会使用
匹配模型作为碰撞检测模型,当匹配模型为真实物体的部分点云时,可能会导致碰撞检测器没有检测到真实环境中的碰撞,所以推荐在抓取配置设置中添加被抓取物体的完整碰撞检测模型。 -
动态障碍物的生成依赖场景点云,场景点云通过ATOM获取,需要在ATOM图中添加
去除模型匹配邻域和点云坐标系变换两个节点。去除模型匹配邻域节点将匹配出来的模型附近的点云进行过滤,点云坐标系变换将相机坐标系下的点云变换到机器人坐标系下。另外需要将点云坐标系变换的输出节点进行参数映射,映射名称为"ScenePointCloud"。
