경로 계획 매개변수 설명
운동 계획기
계획기 유형
오른쪽 드롭다운 목록에서 계획기를 선택할 수 있으며, 운동 계획기에는 다음과 같은 선택지가 있습니다:
관절 공간 계획기
관절 공간 계획기는 로봇의 관절 공간에서 직접 경로 계획을 수행합니다. 주요 특징은 다음과 같습니다:
-
정밀 제어: 로봇 관절의 정밀 제어에 적합합니다.
-
복잡성: 고차원 관절 공간에서 검색이 복잡할 수 있습니다.
-
적용성: 정밀한 관절 움직임이 필요한 로봇 팔 등에 적합합니다.
직선 계획기
직선 계획기는 직선을 따라 경로 계획을 수행하며, 일반적으로 간단한 직선 운동에 사용됩니다. 주요 특징은 다음과 같습니다:
-
간단하고 빠름: 간단한 환경에 적합하며 계산 속도가 빠릅니다.
-
경로가 직선: 생성된 경로가 직선으로, 장애물이 없는 환경에 적합합니다.
-
한계: 복잡한 환경에서의 경로 계획에는 적합하지 않습니다.
베지어 곡선 계획기
베지어 곡선 계획기는 베지어 곡선을 사용하여 매끄러운 경로를 생성합니다. 주요 특징은 다음과 같습니다:
-
매끄러운 경로: 생성된 경로가 매끄럽고 경로의 매끄러움이 중요한 애플리케이션에 적합합니다.
-
복잡한 계산: 계산 복잡도가 높으며, 정밀 제어 및 매끄러운 경로가 필요한 환경에 적합합니다.
-
유연성: 다양한 형태의 곡선 경로를 생성할 수 있습니다.
빠른 랜덤 트리 계획기
빠른 랜덤 트리는 랜덤 샘플링을 통해 트리 구조를 점진적으로 확장하는 경로 계획기입니다. 고차원 공간에서의 경로 검색 문제에 적합합니다. 주요 특징은 다음과 같습니다:
-
효율적인 탐색: 넓은 검색 공간을 빠르게 커버할 수 있습니다.
-
간단한 구현: 알고리즘 구현이 상대적으로 간단합니다.
-
무작위성: 경로가 불안정하며, 매번 실행 결과가 다를 수 있습니다.
최대 시도 횟수
계획기가 경로를 검색할 때 허용되는 최대 반복 횟수입니다. 계획기가 무한 루프에 빠지지 않도록 최대 시도 횟수를 설정해야 합니다.
-
높은 값: 복잡한 환경에 적합하며, 실행 가능한 경로를 찾을 확률이 높아지지만 계산 시간이 증가합니다.
-
낮은 값: 간단한 환경에 적합하며, 검색을 빠르게 종료하여 계산 자원을 절약합니다.
샘플링 경계 보정
샘플링 경계 보정은 시작점과 목표점 사이의 공간 큐브의 경계를 바깥쪽으로 확장하는 거리입니다. 이 확장 거리는 검색 공간의 범위에 영향을 미칩니다.
-
큰 값: 보정 값이 클 때, 공간 큐브의 경계가 더 많이 확장되어 검색 공간이 커집니다.
-
작은 값: 보정 값이 작을 때, 공간 큐브의 경계가 적게 확장되어 검색 공간이 작아집니다.
계획 해상도
계획 경로에서 각 단계의 보폭 크기를 결정하며, 검색의 세밀도를 결정합니다.
-
높은 해상도 (작은 보폭): 생성된 경로가 더 정밀하고 매끄럽지만 계산량이 증가합니다.
-
낮은 해상도 (큰 보폭): 계산 속도가 빠르지만 경로가 다소 거칠고 매끄럽지 않을 수 있습니다.
경로 복구 계획
유형 |
설명 |
|---|---|
경로 복구 계획 없음 |
시작 계획 지점에서 사전 파지 지점까지의 경로만 계획하고, 파지 지점의 충돌을 검사합니다. 경로 지점의 수는 인터페이스에서 설정한 수이며, 되돌아가는 경로 파지 지점 검사 수는 설정하지 않습니다. |
그랩 경로 충돌 감지 |
시작 계획 지점에서 사전 파지 지점까지의 경로만 계획하고, 파지 지점의 충돌을 검사합니다. 파지할 객체를 도구에 추가하고, 모든 경로 지점의 충돌을 검사합니다 (목적: 파지 경로를 되돌아가는 경로로 취급하여 되돌아가는 경로에서 파지한 물체와의 충돌을 검사함). 되돌아가는 경로 파지 지점 검사 수를 설정해야 하며, 경로 지점의 수는 인터페이스에서 설정한 수입니다. |
경로 복구 계획 |
시작 계획 지점에서 사전 파지 지점까지의 경로를 계획하고, 파지 지점의 충돌을 검사합니다. 이후, 파지할 물체를 도구에 추가한 후, 사전 파지 지점에서 시작 계획 지점으로의 경로를 계획합니다. 경로 지점의 수는 인터페이스에서 설정된 수의 2배입니다. |
경로 점 수
경로 점은 궤적의 기본 구성 요소이며, 각 경로 점에는 위치, 방향 등의 정보가 포함됩니다. 경로 점의 수는 궤적의 세밀도와 정확성에 영향을 미칩니다. 경로 점이 많을수록 궤적이 더 세밀하지만 계획 시간이 증가합니다. 시작 계획 점에서 그랩 점까지의 거리가 긴 경우, 경로 점 수를 늘리는 것이 좋습니다; 반대로 거리가 짧은 경우, 경로 점 수를 줄일 수 있습니다.
|
관절 각도 차이 임계값
관절 각도 차이는 이전 경로 점과 다음 경로 점 사이의 로봇 각 관절 각도 차이의 절대값 합계를 의미합니다.
이 매개변수는 관절 각도 차이를 제한하여 경로 계획 과정에서 로봇의 위치가 크게 변화하지 않도록 하여 경로를 더 매끄럽게 만듭니다.
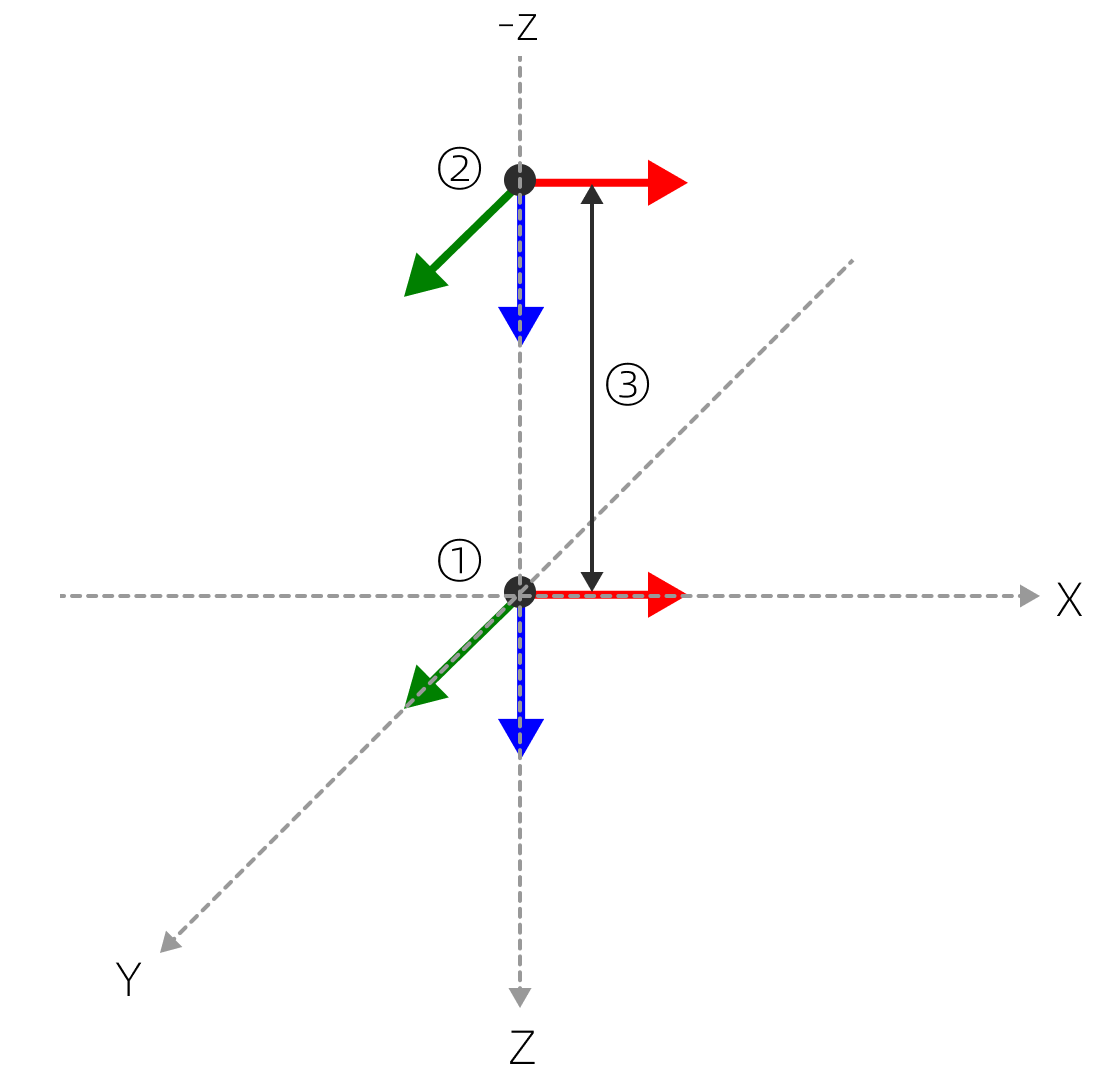
그랩 점 오프셋 벡터
X/Y/Z 성분 설정 설명:
매개변수 값 |
설명 |
|---|---|
0 |
이 방향으로 이동하지 않습니다. |
1 |
양의 방향으로 이동합니다. |
-1 |
음의 방향으로 이동합니다. |
위 그림에서 사전 그랩 점 (②)의 X, Y는 0, Z는 -1로 설정됩니다.
시작 계획 점
잡기 점을 기반으로 경로 점을 추가하여 잡기 점 근처의 비충돌 경로를 계획합니다.
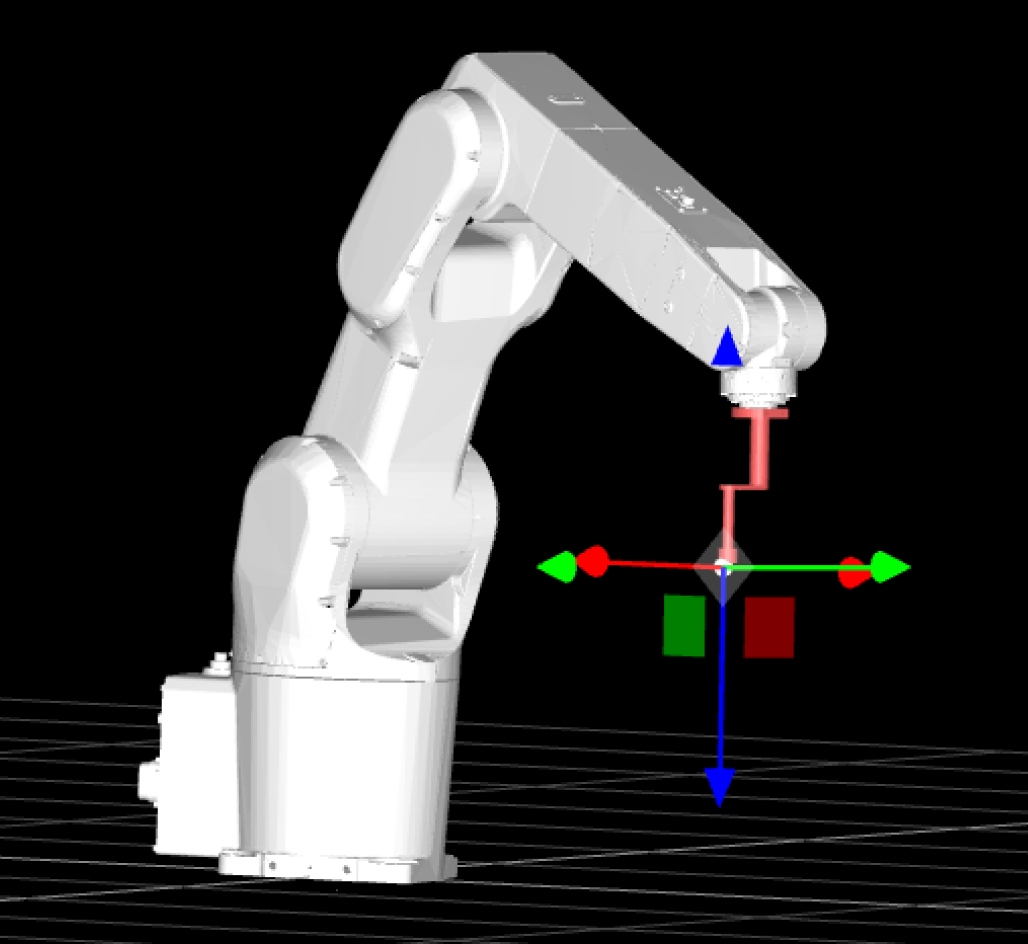
시작 계획 점 추가
| 시작 계획 점의 위치는 직접 설정할 수 없으며, 로봇의 위치를 조정하여 설정해야 합니다. |
-
로봇 항목에서 로봇의 위치를 조정합니다.
-
시작 계획 점 항목 오른쪽의 + 버튼을 클릭합니다.
-
시작 계획 지점은 TCP에서 생성되며, 기본적으로 "시작 계획 지점 1"로 명명됩니다.
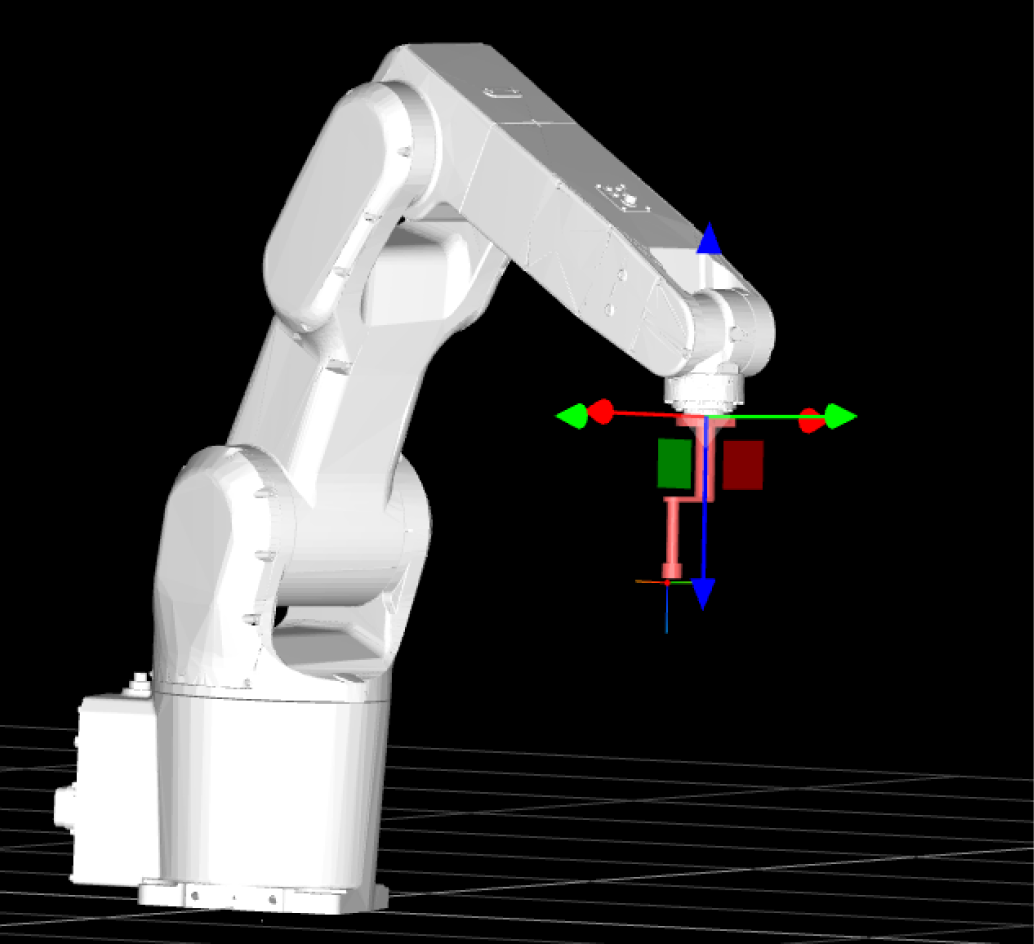
시작 계획 점 생성 전
시작 계획 점 생성 후
-
시작 계획 점 모델 파라미터를 설정합니다 (선택 사항).
-
시작 계획 지점 이름 오른쪽의
 을 클릭합니다.
을 클릭합니다. -
시작 계획 지점 속성 설정 팝업 창에서 시작 계획 지점의 이름을 변경하고, 색상을 편집하며, 크기, 불투명도, 축 길이를 설정할 수 있습니다.
-
추가 사항:
-
계획 점의 위치를 조정해야 하는 경우, 로봇 항목에서 로봇의 위치를 먼저 조정한 후 계획 점 위치 업데이트 버튼을 클릭합니다.
-
로봇 위치가 변경된 경우, 로봇을 해당 점으로 이동 버튼을 클릭하면 로봇 모델이 다시 로봇 계획 점으로 이동합니다.