Eyes in Hand - Four-axis Robot
Preparation
-
Complete the connection of the camera, industrial computer, and robot hardware system.
-
Place the calibration board at the center of the range of motion on one side of the robot, and ensure that the position of the calibration plate remains unchanged during the entire calibration process.
-
Start the internal parameter check tool in Epic Eye to check the camera internal parameter accuracy.
-
Epic Pro configuration:
Open the project solution and enter the workspace to complete the following configuration:
-
Add a custom robot and enable communication configuration (if the communication configuration is not enabled, the robot pose data needs to be manually entered during the calibration process).
-
Add a camera, connect the camera and adjust the camera parameters to ensure that the calibration board in the 2D view is clear and the exposure is appropriate, and that the calibration board point cloud in the point cloud view is smooth.
-
Calibration Process
-
Enter the calibration process
In the camera, click Calibration, select the Eyes in Hand camera installation method, and then click OK to enter the calibration process.
-
Confirm the robot connection status
Epic ProContinuously detect the connection status with the robot.
-
If the robot monitoring port status shows connected, the software can automatically obtain the robot pose data.
-
If shows not connected, it needs to check the robot pose displayed in the robot teach pendant and manually fill it into the point pair data.
-
-
Obtain point pair data
Use the teach pendant to move the robot, make sure the calibration board is in the center of the camera’s field of view, and click Collect point pair data in the point pair list. A set of calibration board pose and robot pose in the current state, as well as measurement accuracy, are obtained.
When the measurement accuracy value is in the range of 0.997~1.003, it is displayed in green, indicating that the current data is available; when it is in the range of 0.993~0.997 or 1.003~1.007, it is displayed in yellow, indicating that the current data is at risk; when it is less than 0.993 or greater than 1.007, it is displayed in red, indicating that the data is unavailable. It is recommended to delete the current data and re-collect. -
Adjust robot pose
After collecting the first set of point pair data, make sure the calibration board is in the camera’s field of view, and use the teach pendant to move the robot and adjust its pose so that each joint changes when moving, thereby driving the camera to change its pose around the calibration board.
-
Repeat collection of point pair data
After adjusting the calibration board pose, click Add to obtain the second set of point pair data. Repeat steps 3-4 to collect at least 10 sets of point pair data.
-
Calculate point pair data
Click Calculate hand-eye calibration results to calculate all the point pair data collected above and obtain the hand-eye calibration results.
It is recommended to perform a calculation for each additional set of data after collecting four sets of point pair data. -
View hand-eye calibration results
Click View calibration results to open the calculation results window and view the hand-eye calibration results.
-
Additional data for four-axis robots
For truss robots, please confirm that the truss robot coordinate system is a right-handed coordinate system. -
Make sure that the error of the hand-eye calibration result in the previous step meets the use requirements.
-
Move the robot to ensure the calibration board is in the center of the camera’s field of view.
-
After clicking Hand-eye calibration accuracy check, fill the current robot pose data into the robot pose; click Obtain pose and send to robot to record the pose of the current calibration board in the robot coordinate system.
-
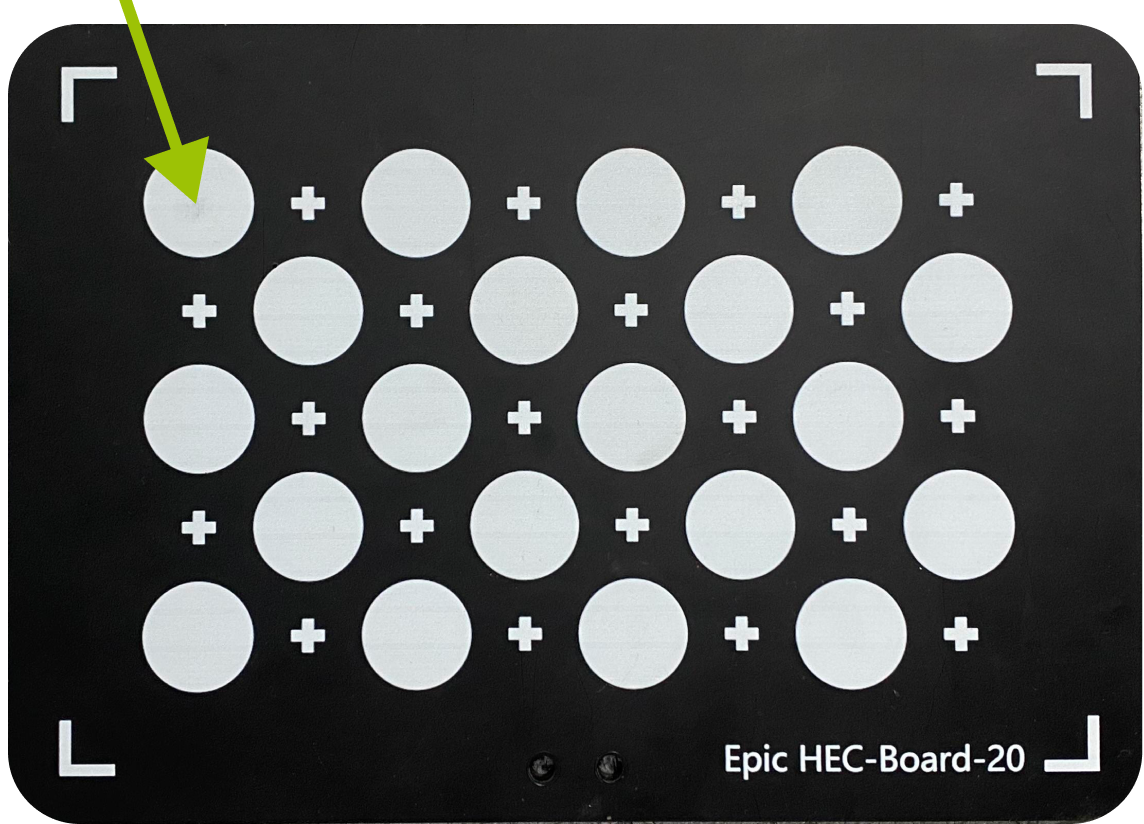
Move the robot to make the robot end-effector in the origin of the calibration board, and record the robot end-effector pose displayed on the teach pendant.
The origin of the calibration board is located at the position pointed by the arrow in the figure below.
-
Subtract the pose data in step 3 from the pose data in step 4 to get the Z offset, and fill the data into the Four-axis Additional Data > Calibration Board Position in Robot Coordinate System, and fill in the parameters of "Calibration Board Position under Camera" as 0.
-
-
Calculate point pair data again
Click Calculate hand-eye calibration results to calculate the hand-eye calibration results.
-
View calculation results
Click View calibration results to open the calculation results window and view the hand-eye calibration results.
The difference between the average translation error and the maximum translation error is used to determine whether the calibration results are usable. If the error value is less than 1mm, it means that the calibration results can be used.