项目方案界面
方案管理界面
在主界面中单击项目方案,进入方案管理界面。

在该界面中,您可以查看方案并执行以下操作:
-
导入本地方案(1):从本地文件系统导入现有项目方案(.epicpro文件)。
-
新建方案(2):创建新的项目方案。
-
打开方案配置界面(3):编辑当前项目方案的配置信息。
-
重命名方案(4):修改项目方案的名称。
-
导出方案(5):将项目方案导出到本地文件系统。
-
删除方案(6):将项目方案从方案列表中删除。
方案配置界面
单击方案中的打开,打开方案配置界面。

在该界面中,您可以进行空间管理(1)并完成方案的具体配置,包括场景配置(2)、抓取配置(3)、运行方案(4)以及查看各项状态(5)。
场景配置界面(2)
场景配置界面由以下三部分组成:
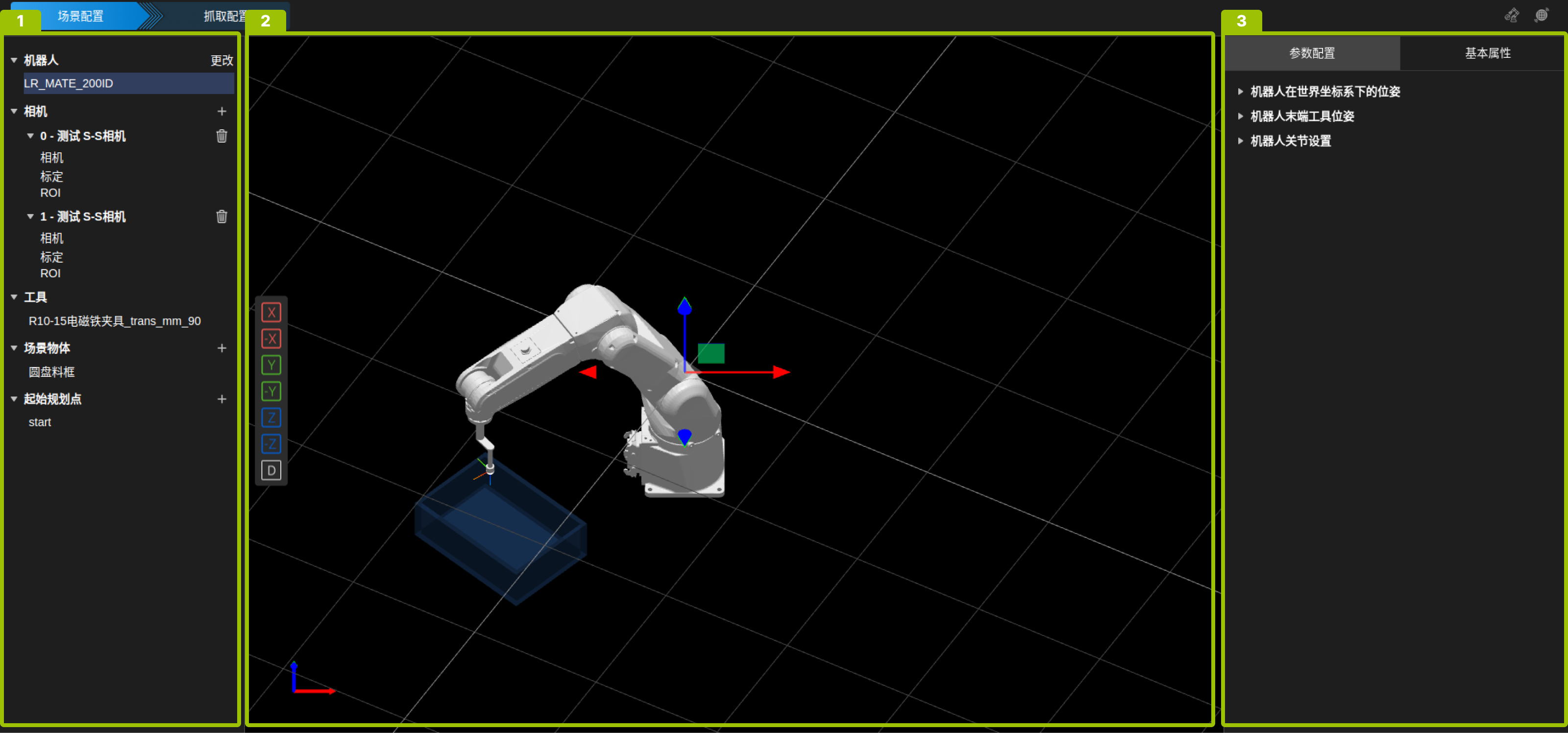
序号 |
区域名称 |
说明 |
|---|---|---|
1 |
资源树 |
管理方案中使用的各项资源。 |
2 |
场景显示区域 |
显示机器人、工具、场景物体的模型与位姿。 |
3 |
参数设置区域 |
设置各项资源的详细参数。 |
场景显示区域视角调整说明:
旋转视角 |
长按鼠标左键并向任一方向拖动。 |
平移视角 |
长按鼠标右键并向任一方向拖动。 |
缩放视角 |
滑动鼠标滚轮。 |
详细的场景配置说明请参阅场景配置说明。
抓取配置界面(3)
抓取配置界面由以下三部分组成:
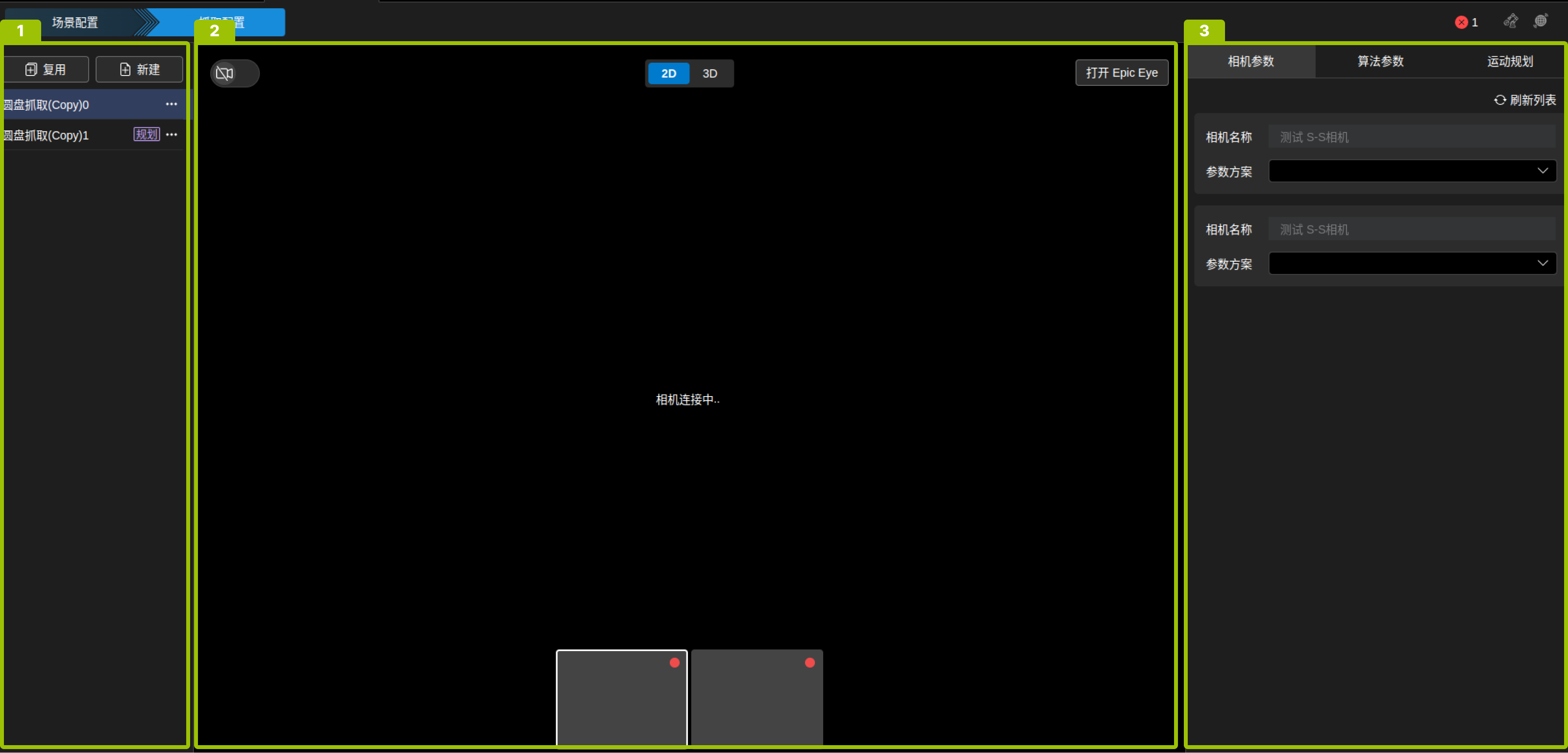
序号 |
区域名称 |
说明 |
|---|---|---|
1 |
抓取配置管理区域 |
新建、复用、重命名、删除抓取配置。 |
2 |
视图显示区域 |
显示2D视图、点云、机器人、场景物体等。 |
3 |
参数设置区域 |
相机参数显示、算法参数配置、运动规划配置。 |
详细的抓取配置说明请参阅抓取配置说明。
方案运行界面(4)
完成必要的场景配置和抓取配置后,单击界面右上角的运行方案,进入方案运行界面。
该界面主要由以下4部分组成:
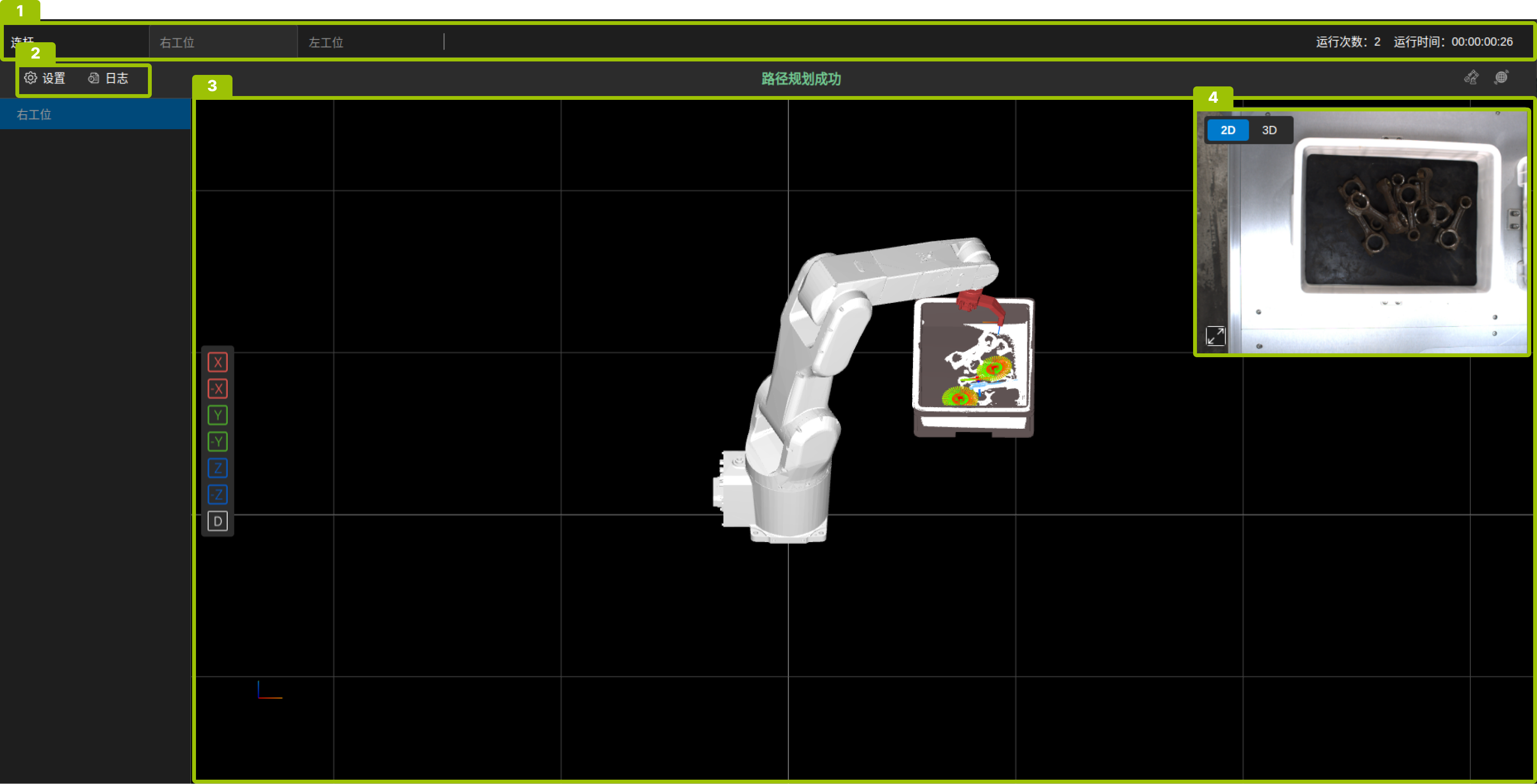
序号 |
名称 |
说明 |
|
|---|---|---|---|
1 |
信息栏 |
该区域显示当前方案和全部空间,以及方案运行次数和运行时间。 |
|
2 |
菜单栏 |
设置 |
手动模式:勾选后,可在软件中手动触发拍照和检测。 |
插件功能:使用自定义功能。 |
|||
运行界面截图:保存运行界面的截图。 |
|||
样本数据采集:保存.epicraw文件。 |
|||
HOOK重新编译:编译自定义脚本,脚本文件需存放在安装目录的/wwwroot/Extensions中。 |
|||
退出运行:退出方案运行界面。 |
|||
关闭软件:关闭Epic Pro。 |
|||
关闭工控机:关闭工控机。 |
|||
日志 |
查看方案运行日志。 |
||
3 |
场景显示区域 |
该区域显示机器人、工具场景物体,点云,匹配结果,抓取点,机器人运动轨迹等。 |
|
4 |
相机视图显示区域 |
该区域用于显示和切换2D图与点云。 |
|