初期プランニングポイント
キャッチポイントに基づいて、キャッチポイント近くの無衝突パスを計画するために1つのパス点を追加します。
初期プランニングポイントの追加
| 初期プランニングポイントのポーズは、直接パラメータで設定するのではなく、ロボットのポーズを設定することで実現する必要があります。 |
-
ロボット項目でロボットのポーズを調整します。
-
初期プランニングポイント項目の右側にある+をクリックします。
-
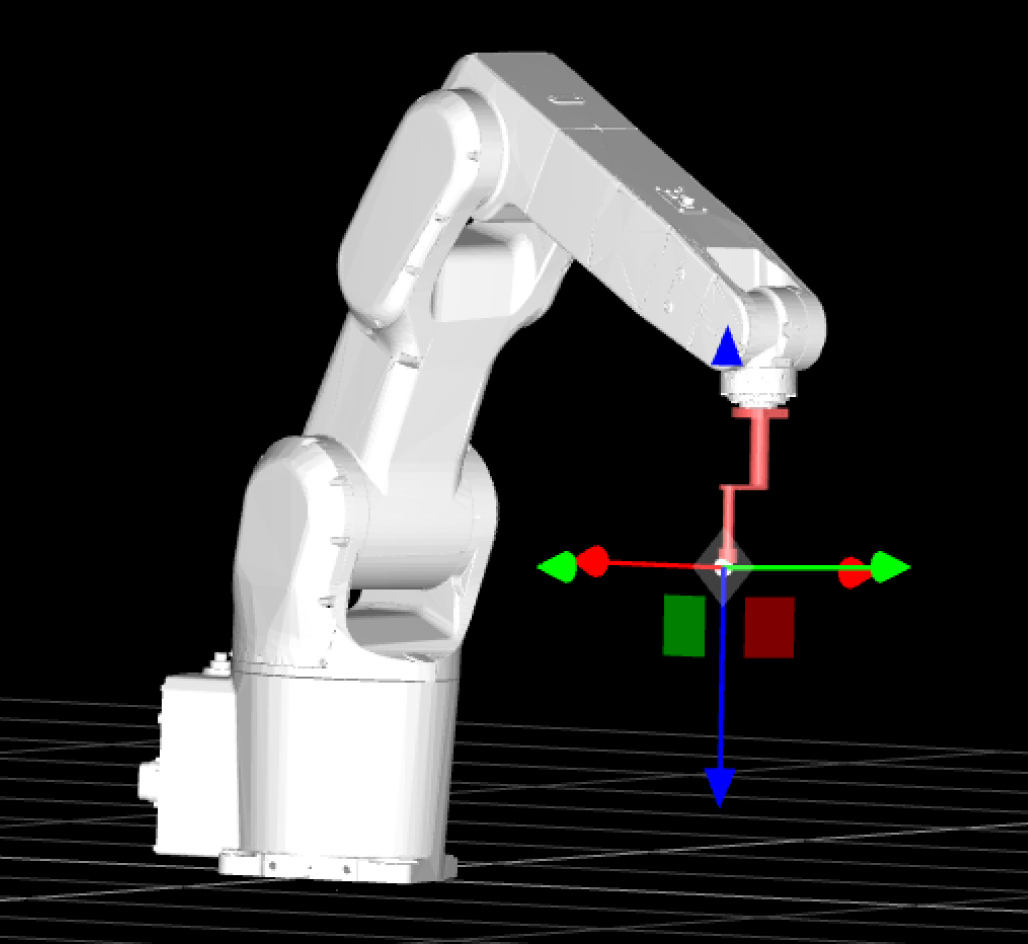
ポップアップウィンドウで名前を入力し、確認をクリックします。初期プランニングポイントがTCPで生成されます。
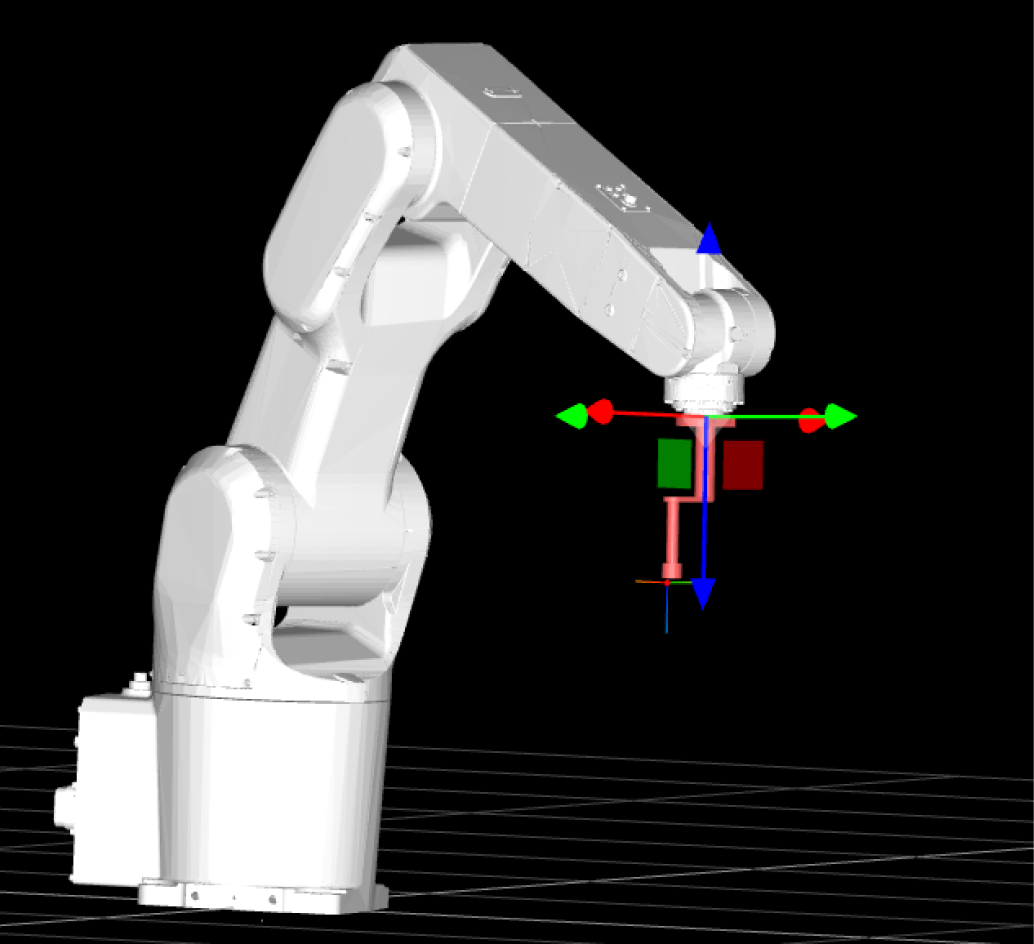
初期プランニングポイント生成前
初期プランニングポイント生成後
-
初期プランニングポイントのモデルパラメータを設定します(オプション)。
-
基本情報 > 色 で初期プランニングポイントモデルの色を調整できます。
-
モデルパラメータ でモデルのサイズ、不透明度、および座標軸の長さを調整できます。
-
さらに:
-
プランニングポイントのポーズを調整する必要がある場合は、最初にロボット項目でロボットのポーズを調整し、その後プランニングポイントのポーズを更新をクリックします。
-
ロボットのポーズが変更された場合は、ロボットをこのポイントに移動をクリックすると、ロボットモデルが再びロボットのプランニングポイントに戻ります。