衝突検出設定説明
概要
衝突検出を設定して、ロボットの掴み取りプロセスで発生する可能性のある衝突を検出します。
衝突検出は、衝突検出ペアおよび対応する衝突閾値を設定することで実現されます。
-
衝突検出ペアは、衝突が発生する可能性のある両者です。
-
衝突閾値は衝突に対する許容度であり、この値が大きいほど、衝突に対する許容度が大きくなります。
設定チュートリアル
衝突検出設定のプロセスは次のとおりです:
-
設定マトリックスを開く
btn:[設定マトリックスを開く] をクリックして、衝突検出マトリックス設定ウィンドウを開きます。
-
衝突検出ペアを選択する
ロボットの各関節、ツール、シーンオブジェクト、動的障害物(シーン点群、マッチング結果モデル)間での衝突を設定できます。実際のニーズに応じて、適切な衝突検出ペアを選択します。
行と列の情報に基づいて、対応するセルをクリックして衝突検出ペア設定ウィンドウを開きます。
-
衝突検出閾値を設定する
-
衝突検出ペア設定ウィンドウで、衝突閾値の下の欄から衝突検出単位を選択し、閾値を設定します。
-
btn:[設定を追加] をクリックします。設定済みの衝突検出ペアのセルが青色に変わり、閾値パラメータが表示されます。
-
btn:[設定を保存] をクリックします。
-
-
オクツリーの解像度を設定する
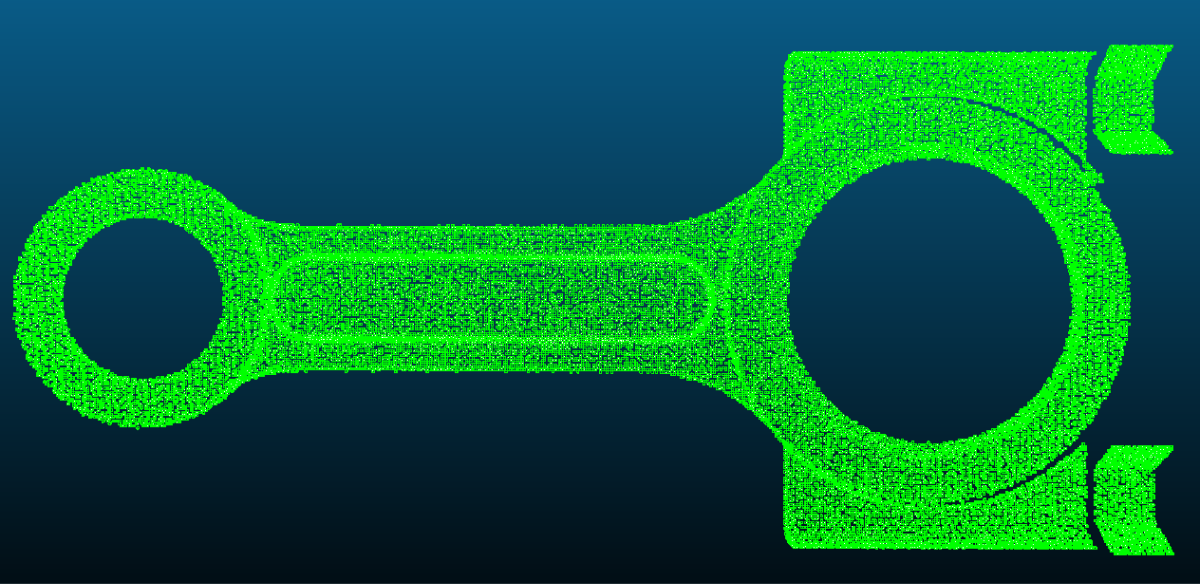
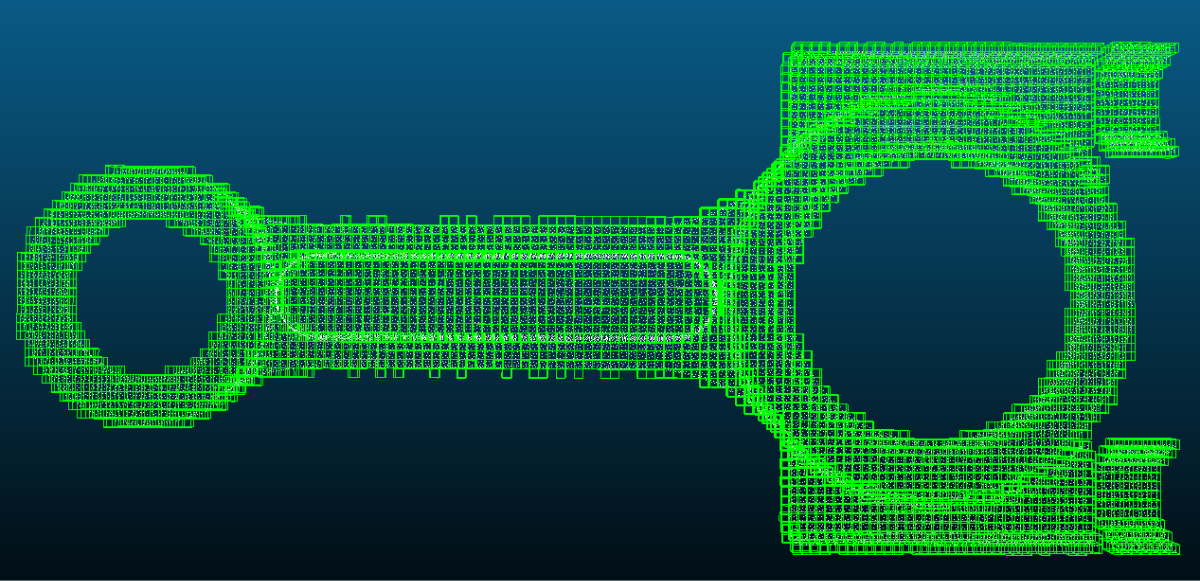
オクツリーの解像度は、オクツリーの葉ノードが表す空間のサイズ(立方体の辺の長さ)です。衝突検出プロセス中に、点群自体は直接関与せず、点群をオクツリーに変換して実現します。オクツリーが他の物体と衝突する場合、それは点群が衝突したと見なされます。オクツリーの解像度パラメータを調整することで、立方体の辺の長さを変更し、衝突検出の精度と効率に影響を与えます。
同じ点群について:
解像度
小立方体の数
計算精度
計算時間
図示
低い
多い
精密
長い
高い
少ない
粗い
短い
-
衝突検出を実行する
-
btn:[撮影] をクリックし、撮影が完了するのを待ちます。
-
btn:[検出] をクリックし、検出が完了するのを待ちます。
-
btn:[衝突検出] をクリックし、衝突検出が完了するのを待ちます。
衝突検出の結果は、パラメータ設定バーの最上部に表示されます。
-