Invers Calculation of TCP
Introduction
The TCP reverse calculation tool calculates the tool coordinate system values of the current robot based on the grasping pose from visual computation and the teaching robot pose.
In the main interface of the software, click menu: Toolbox [Invers Calculation of TCP] to enter this tool.
User Interface
This tool consists of the following three parts:
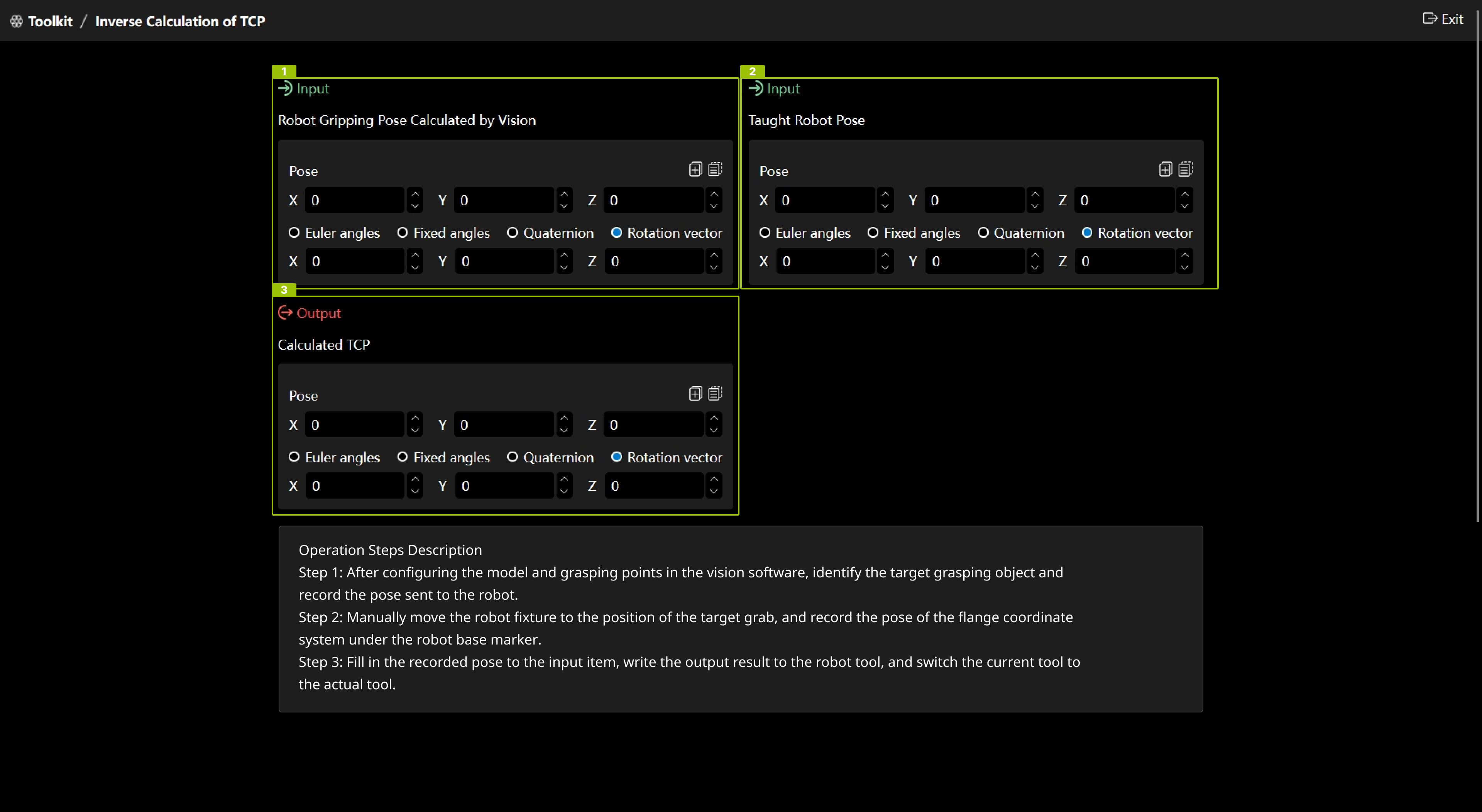
No. |
Description |
|---|---|
1 |
Input the grasping pose from visual computation |
2 |
Input the teaching robot pose |
3 |
View the solved TCP |
Usage Tutorial
The workflow for using this tool is: Input the grasping pose from visual computation > Input the teaching robot pose > View the solved TCP.
-
After configuring the model and grasping points in the visual software, identify the target grasp object and record the pose sent to the robot.
-
Manually move the robot gripper to the position of the target grasp object and record the flange coordinate system pose in the robot base coordinate system.
-
Fill in the recorded pose into the input fields, write the output results into the robot tool, and switch the current tool to the actual tool.