Hand-eye calibration description
Related terms and concepts
-
Hand-eye calibration
It refers to the process of calculating the transformation relationship between the robot coordinate system and the camera coordinate system by collecting the calibration object pose and robot pose captured by the camera. Using the calculated transformation matrix, the target point in the camera coordinate system can be converted to the robot coordinate system, thereby realizing the 3D vision-guided operation. The accuracy of hand-eye calibration is crucial and will directly affect the accuracy and stability of the system.
-
Camera installation
Installation method
Description
Illustration
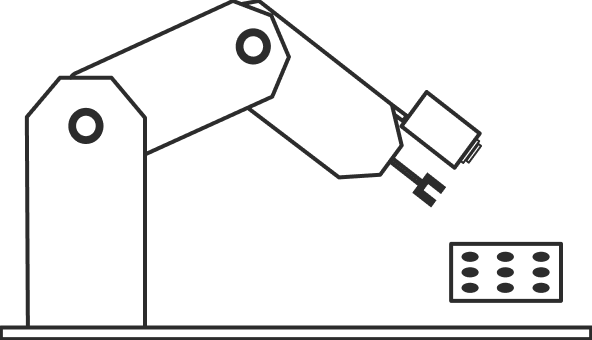
Eye in hand (EIH)
The camera is installed at the end of the robot and is relatively fixed to the flange coordinate system. The camera moves with the end of the robot.
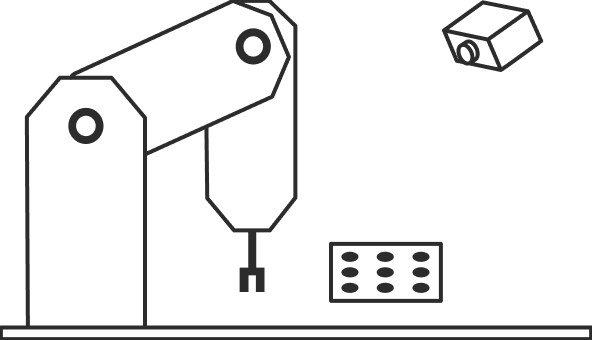
Eye to hand (ETH)
The camera is installed in a fixed position, and its relative position to the robot base coordinate system remains unchanged.
-
Point pair data
A pair of pose information of the same feature point in the camera and robot coordinate systems.
Hand-eye calibration tutorial
Please refer to the corresponding hand-eye calibration tutorial according to the actual situation.
Scene |
Tutorial |
|---|---|
Hand-eye calibration in the eye-to-hand (ETH) scenario |
|
Hand-eye calibration in the eye-in-hand (EIH) scenario |
|
When to recalibrate hand-eye
Hand-eye calibration needs to be recalibrated when the following situations occur.
-
Replace the camera or robot.
-
In the eye-to-hand scenario, the camera position changes relative to the robot base coordinate system.
-
In the eye-in-hand scenario, the camera position changes relative to the robot flange coordinate system.