Start planning point
Add a path point based on the grasp point to plan a collision-free path.
Add start planning point
| The start planning point pose cannot be set directly through its own parameters, but needs to be achieved by setting the robot pose. |
-
In the robot entry, adjust the robot pose.
-
Click the + on the right side of the start planning point entry.
-
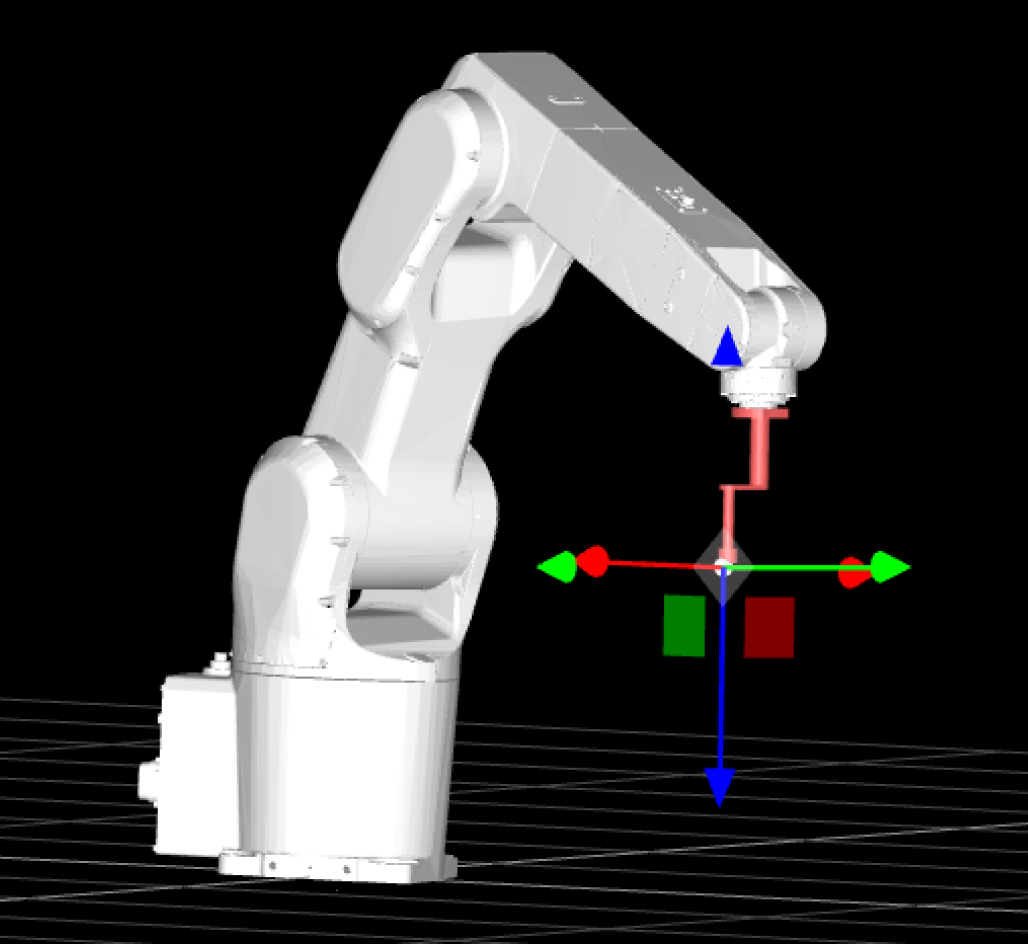
After entering the name in the pop-up window, click Confirm. The start planning point will be generated at the TCP.
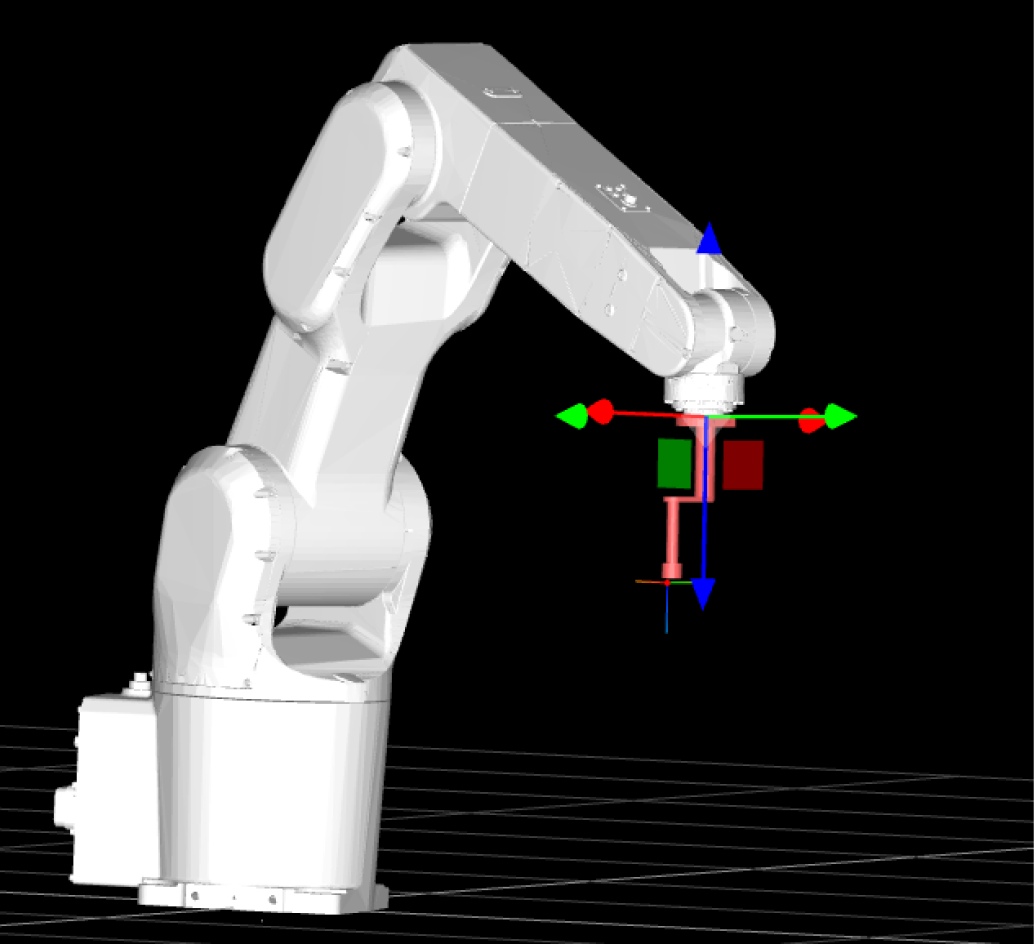
Before starting planning point generation
After starting planning point generation
-
Set the start planning point model parameters (optional).
-
In Basic Information > Color, you can adjust the model color of the starting planning point.
-
In Model Parameters, you can adjust the model size, opacity, and axis length.
-
In addition:
-
If need to adjust the planning point pose, you have to adjust the robot pose in the robot entry first, and then click Update planning point pose.
-
If the robot pose changes, click Move robot to this point to return the robot model to the robot planning point.