常见场景的ATOM模版图文档
整体概览
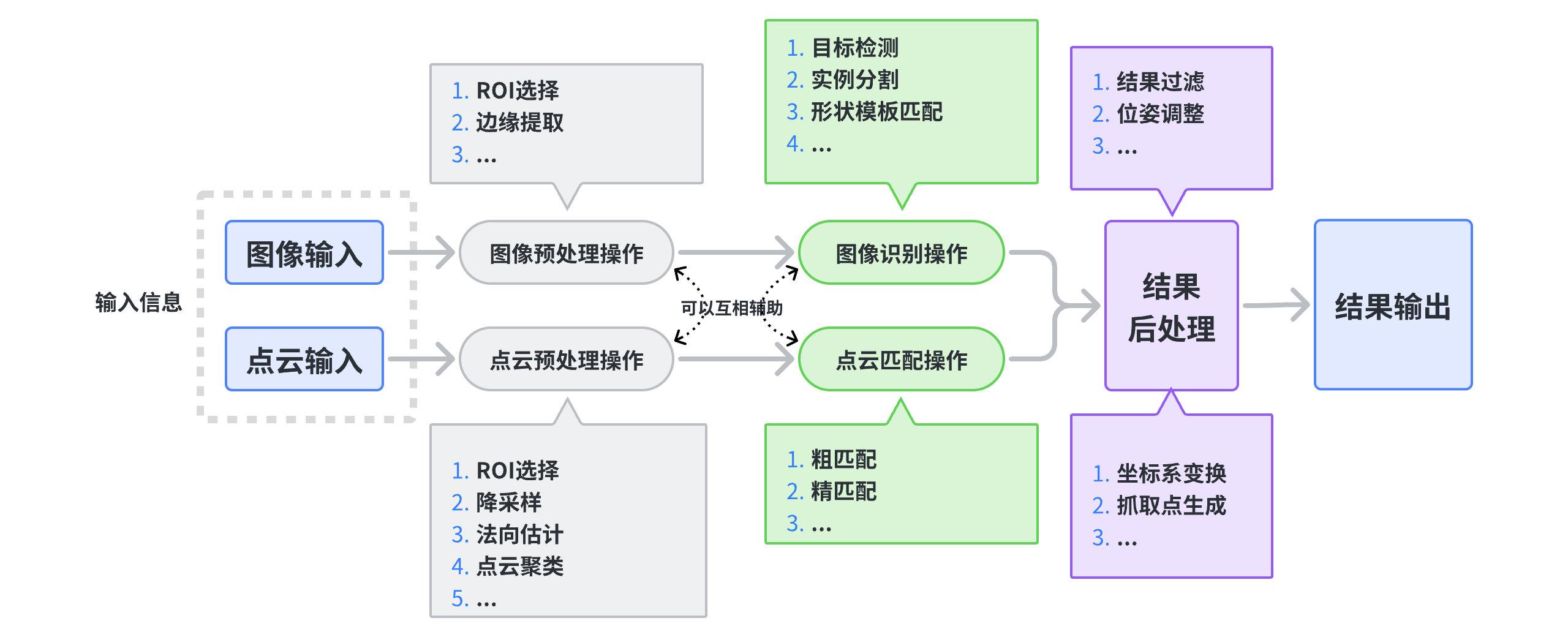
如上图所示,整一个操作流程可以被简单划分成五个部分:
-
输入
-
预处理操作: 这一部分主要是对输入信息进行筛选过滤,比如设定一些ROI
-
识别/匹配操作:核心操作,主要进行智能感知,发现物体的位置和姿态信息
-
结果后处理操作:主要针对位置姿态生成后续操作,比如抓取点生成。当然也会对结果进行过滤,提高准确度
-
输出
根据调试需求,atom图可分为两种,两种图的差别主要是在于输入输出,可通过调整输入输出进行转换:
-
ATOM调试图,输入为读取EpicRaw节点或EpicEye相机节点或读取点云+读取彩色图节点和测试数据节点,输出大多为生成抓取点节点+抓取点排序节点+绘制抓取点节点,根据不同需求可任意调整
-
EpicPro调试运行图,输入输出为EpicPro输入和EpicPro输出,配合epicPro运行
这两种图之间的转换主要在于输入输出的变化,同时ATOM调试图中,配置3维ROI节点可删除,改为从EpicPro输入节点获取3维ROI,以避免ROI出现
根据操作依赖输入的种类的不同,大致可以分为四种:
-
纯图像识别
-
纯点云识别
-
图像点云混合识别
-
大模型探索
分类 |
描述 |
使用场景 |
优点 |
缺点 |
纯图像识别 |
利用深度学习目标检测、实例分割方法或2d图像形状匹配方法进行图像分割,再结合点云信息进行后处理得到结果 |
袋子,箱子等木目标表面纹理特征明显,易于区分的场景,或目标形变无法用点云匹配的场景 |
(1) 能够应对非刚体 (2) 针对点云效果不好的情况可能有一定优势 |
(1) 需要采集图像进行标注训练 |
纯点云识别 |
直接用目标匹配 |
适用于表面不平整或难以提取目标边缘的的刚体场景,如曲轴,角阀等表面不平整的零件等 |
(1) 能够应对复杂姿态下的物体 |
(1) 精度依赖于点云的质量 |
用目标提取边缘做匹配 |
适用于目标表面平整且边缘明显的刚体场景,如耐火砖场景 |
(1) 相比较直接点云匹配速度更快 |
(1) 精度依赖点云质量 (2) 依赖目标的边缘 |
|
多视角方法进行匹配 |
适用于遮挡情况较多的场景 |
(1) 对遮挡场景效果较好 (2) 需要调参少 (3) 可根据工件设置视角 |
(1) 速度受尺度影响较大 |
|
图像点云混合 |
用2d方法先将目标附近区域提取出来再进行匹配 |
针对一些没有形变但是可能目标间缝隙太小难以很好匹配的场景,如和泰有序棒料场景 |
(1) 能够应对物体间缝隙小造成的匹配困难 |
(1) 需要图像和点云的操作,总体耗时可能较高 |
大模型(探索性) |
检测或分割结果+sam |
可通过点云分割或目标检测得到目标框和中心点坐标,将这两个结果(可只用一个)输入到Sam分割节点进行分割 |
(1) 可减少标注和训练 |
(1)模型效果不能完全保证现场使用 (2)对GPU要求较高,直接用CPU运行时间会很长 |
常用atom模板图列表
以下链接若打不开,则需复制地址到chrome浏览器打开
常用模板图
-
1.1.3版本ATOM在*EpicPro输入*节点中加入了本地读取功能,可以在节点中*开启本地读取*参数从本地文件夹读取.epicraw文件,每次运行会重新读取一个epicraw文件,便于多图测试。
-
为了便于复现现场问题,该文件夹下应该至少包含一个epicraw文件,并包含一个带3维ROI和手眼标定矩阵的json文件,若没有,则按默认值运行,手眼标定矩阵为单位阵,该JSON文件命名为runSpace.json,格式为{'3DROI': [{'min':[min_x, min_y, min_z], 'max': [max_x, max_y, max_z], 'transform': cam2ROIFrame}], 'cam2baseMatrix': [[], [], [], []]}。
-
以下模板图使用时,需要在EpicPro节点中修改EpicRaw文件夹路径为本地路径,可对应下载表格中的zip数据解压,也可指定包含epicraw的路径,若需要完整复现,需要在文件夹内按要求放入runSpace.json文件来提供ROI和手眼标定矩阵。若需要与EpicPro软件联调,可直接关闭开启本地读取开关,从EpicPro软件进行调用。
模板ATOM文件 |
链接地址 |
模板类型 |
相关数据 |
所用场景 |
袋子分割 |
纯图像识别 |
袋子拆垛 |
||
箱子检测 |
纯图像识别 |
箱子检测 |
||
SFM点云匹配 |
纯点云识别 |
小料框无序抓取 |
||
SFM点云匹配-多视角 |
纯点云识别 |
无序抓取 |
||
SFM点云匹配-边缘 |
纯点云识别 |
无序抓取 |
||
2d形状匹配+点云匹配 |
图像点云混合 |
圆环测试-2d+3d匹配 |
||
点云分割-蒸发器 |
图像点云混合 |
格力美的蒸发器分割 |
||
点云分割+SAM |
大模型(探索性) |
探索中,暂无实际应用 |
||
点云分割+掩膜处理+SAM |
大模型(探索性) |
探索中,暂无实际应用 |
||
GroundDino+SAM |
大模型(探索性) |
探索中,暂无实际应用 |
||
法向位姿估计 |
法向位姿估计流程 |
带子图的模板图
模板ATOM文件 |
链接地址 |
模板类型 |
相关数据 |
所用场景 |
条件分支 |
条件判断 |
可用于同一个垛盘可能更换物料的场景 |
||
袋子分割 |
纯图像识别 |
袋子拆垛 |
||
箱子检测 |
纯图像识别 |
箱子检测 |
||
法向位姿估计 |
法向位姿估计流程 |