도구 라이브러리 인터페이스
주 인터페이스에서 도구 라이브러리를 클릭하여 도구 라이브러리 인터페이스로 이동합니다. 이 인터페이스에서 “기하학적 포인트 클라우드 생성 도구”와 “3D 회전 변환 계산”을 열 수 있습니다.
기하학적 포인트 클라우드 생성 인터페이스
기하학적 포인트 클라우드 생성 도구는 구체, 원통, 원환, 사다리꼴, 큐브와 같은 규칙적인 기하 도형의 포인트 클라우드 모델을 생성하는 데 사용됩니다. 이 모델들은 작업물의 포인트 클라우드 매칭 템플릿을 만드는 데 사용할 수 있습니다.
도구 라이브러리 인터페이스에서 기하학적 포인트 클라우드 생성을 클릭하여 기하학적 포인트 클라우드 생성 도구 인터페이스로 이동합니다. 이 인터페이스는 다음 세 부분으로 구성됩니다:
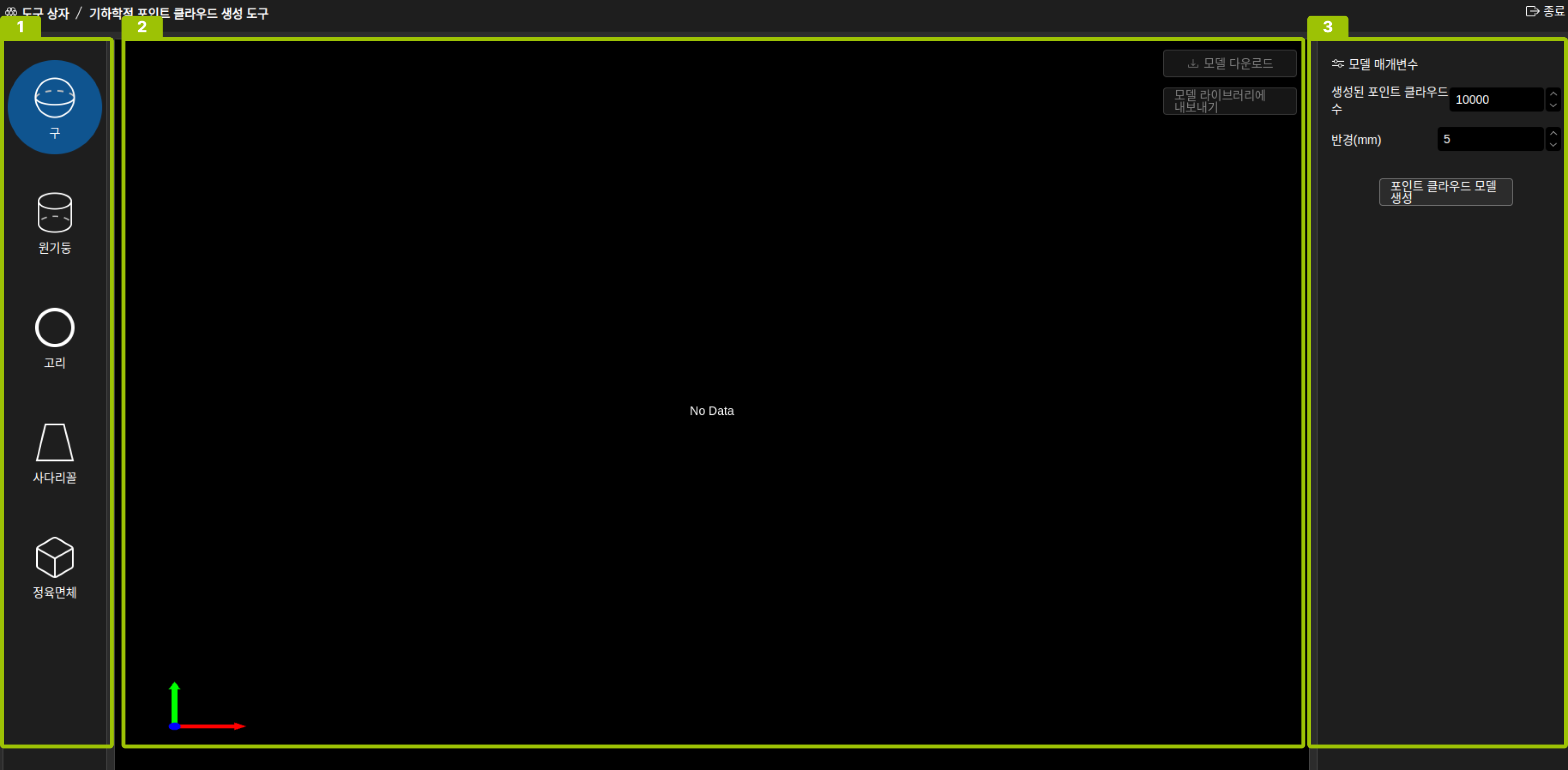
번호 |
영역 |
설명 |
|---|---|---|
1 |
모델 유형 선택 영역 |
이 영역에서 기하 도형 유형을 선택합니다. 선택 가능한 유형은 구, 원통, 원환, 사다리꼴, 큐브입니다. |
2 |
모델 표시 영역 |
이 영역에서 생성된 포인트 클라우드 모델을 보고, 모델을 다운로드하거나 내보낼 수 있습니다. |
3 |
모델 매개변수 설정 영역 |
이 영역에서 기하 도형의 다양한 매개변수를 설정합니다. |