TCP 역산 도구
소개
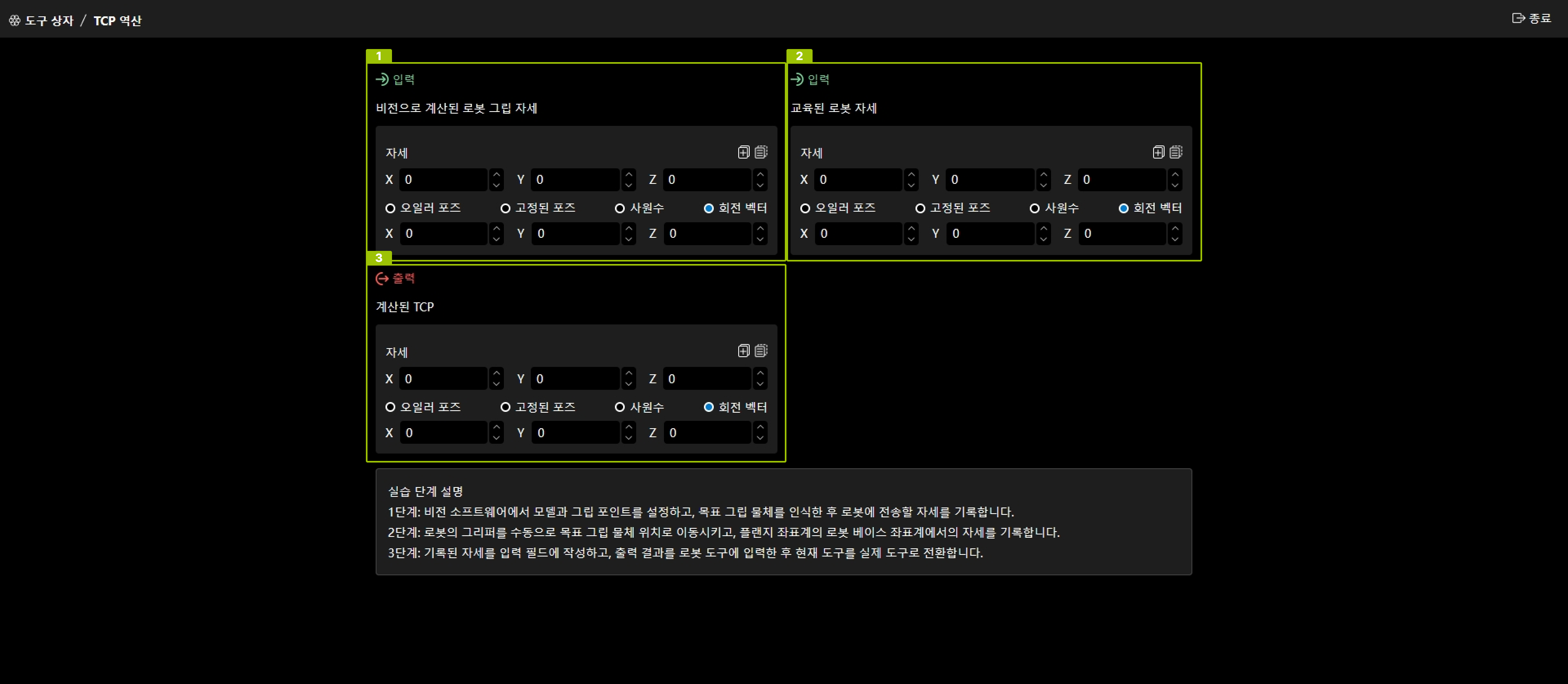
TCP 역산 도구는 시각 계산을 기반으로 한 잡기 점 포즈와 가르침 받은 로봇 포즈를 이용해 현재 로봇의 도구 좌표계 수치 값을 계산하는 도구입니다.
소프트웨어 메인 인터페이스에서 순서대로 를 클릭하여 해당 도구로 들어갑니다.
TCP 역산 도구는 시각 계산을 기반으로 한 잡기 점 포즈와 가르침 받은 로봇 포즈를 이용해 현재 로봇의 도구 좌표계 수치 값을 계산하는 도구입니다.
소프트웨어 메인 인터페이스에서 순서대로 를 클릭하여 해당 도구로 들어갑니다.