손-눈 보정 설명
손-눈 보정 관련 용어 및 개념
-
손-눈 보정
카메라가 촬영한 보정물의 위치와 로봇의 위치를 수집하여 로봇 좌표계와 카메라 좌표계 간의 변환 관계를 계산하는 과정을 말합니다. 계산된 변환 행렬을 사용하여 카메라 좌표계의 목표 지점을 로봇 좌표계로 변환할 수 있으며, 이를 통해 3D 비전 유도 하에 로봇 작업을 수행할 수 있습니다. 손-눈 보정의 정확도는 시스템의 정확성과 안정성에 직접적인 영향을 미칩니다.
-
카메라 설치 방식
설치 방식
설명
그림
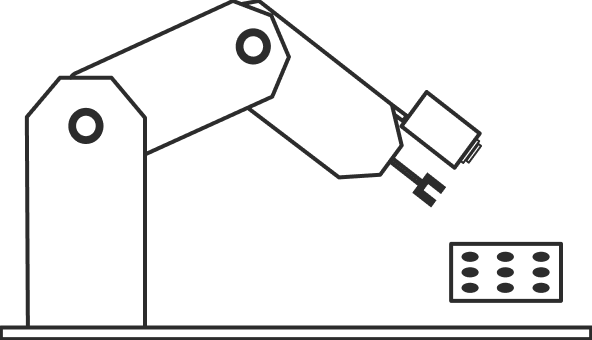
손에 카메라 (EIH)
카메라가 로봇의 끝단에 설치되어 있으며, 플랜지 좌표계에 상대적으로 고정되어 있으며, 카메라는 로봇 끝단과 함께 이동합니다.
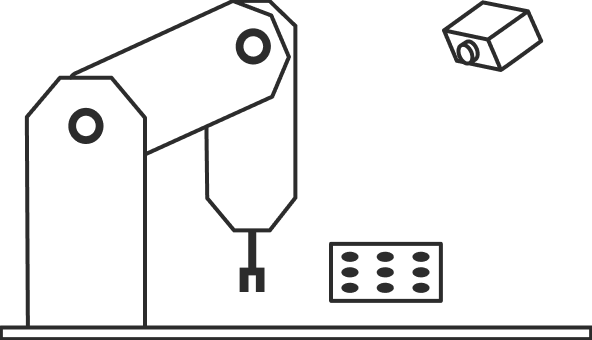
손 밖에 카메라 (ETH)
카메라가 고정 위치에 설치되어 있으며, 로봇의 기준 좌표계에 대해 상대적인 위치가 변하지 않습니다.
-
점대 데이터
동일한 특징점이 카메라와 로봇 두 좌표계에서 각각의 위치 정보를 나타냅니다.