Collision detection configuration instructions
Introduction
Collision detection is configured to detect possible collisions during the robot’s grasping process.
Collision detection is mainly achieved by setting collision detection pairs and the corresponding collision thresholds.
-
Collision detection pairs are the two parties that may collide.
-
Collision threshold is the tolerance for collisions. The larger the value is set, the greater the tolerance for collisions.
Configuration tutorial
The collision detection configuration process is as follows:
-
Open the configuration matrix
Click Open configuration matrix to open the collision detection matrix configuration window.
-
Select collision detection pairs
You can configure collisions between robot joints, tools, scene objects, and dynamic obstacles (scene point clouds, matching result models). Select the appropriate collision detection pair according to needs.
According to the row and column information, click the corresponding square to open the collision detection pair configuration window.
-
Set collision detection threshold
-
In the collision detection pair configuration window, select the collision detection unit in the collision threshold column and set the threshold.
-
Click Add configuration. The configured collision detection pair grid will turn blue and display the threshold parameters.
-
Click Save configuration.
-
-
Set octree resolution
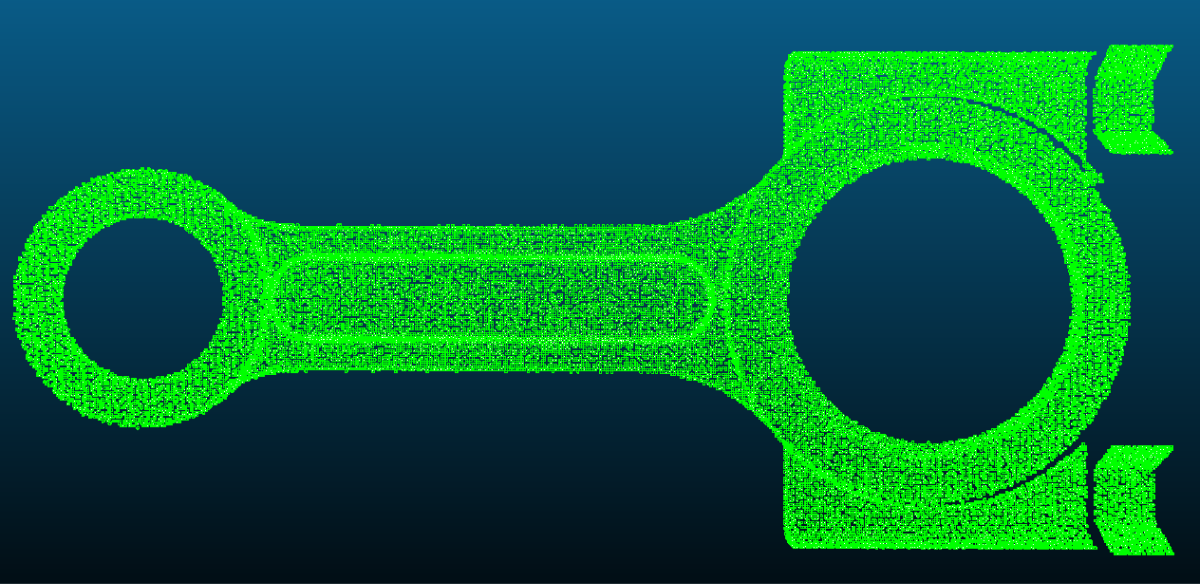
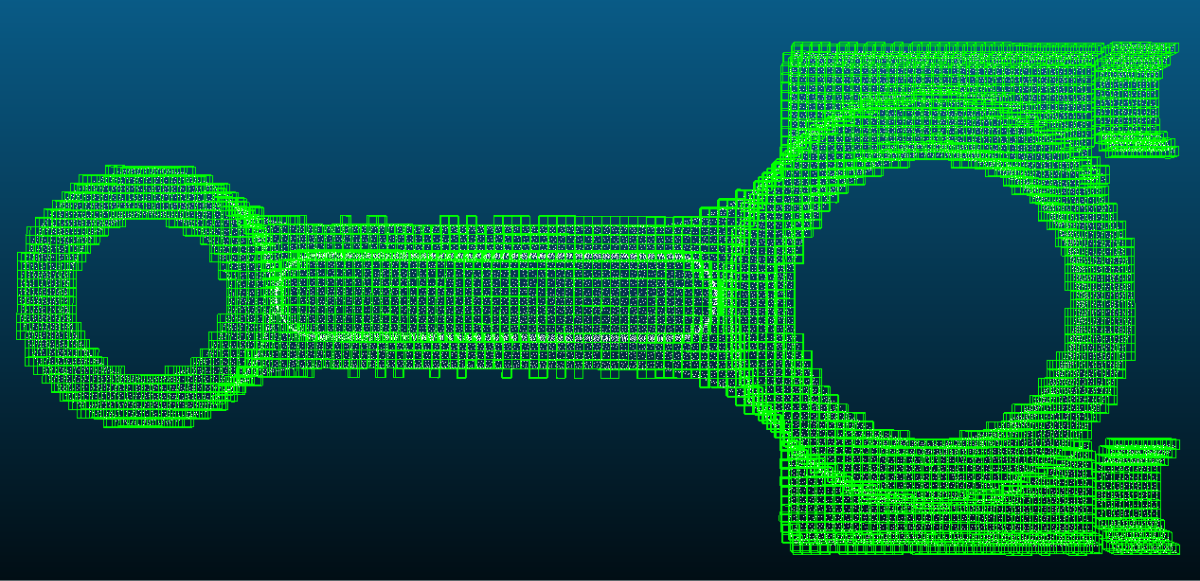
Octree resolution refers to the size of the space represented by the leaf node in the octree (the side length of the cube). In the collision detection process, the point cloud itself does not directly participate, but is achieved by converting the point cloud into an octree. If the octree collides with other objects, it is considered that the point cloud has collided. By adjusting the octree resolution parameter, the side length of the cube can be changed, which affects the accuracy and efficiency of collision detection.
For the same point cloud:
Resolution
Number of small cubes
Calculation accuracy
Calculation time
Graphics
Lower
More
Accurate
Longer
Higher
Less
Rough
Shorter
-
Perform collision detection
-
Click Capture and wait for the photo to be taken.
-
Click Detect and wait for the detection to be completed.
-
Click Collision detection and wait for the collision detection to be completed.
The collision detection result will be displayed at the top of the parameter configuration bar.
-