手眼キャリブレーション説明
手眼キャリブレーションの用語と概念
-
手眼キャリブレーション
キャリブレーションボードの姿勢データとロボットの姿勢データを収集し、ロボット座標系とカメラ座標系の間の変換関係を計算することを指します。計算された変換行列を使用して、カメラ座標系の目標点をロボット座標系に変換し、3Dビジョンガイドの下でロボットの操作を実現できます。手眼キャリブレーションの精度はシステムの精度と安定性に直接影響するため、非常に重要です。
-
カメラの取り付け方法
取り付け方法
説明
図示
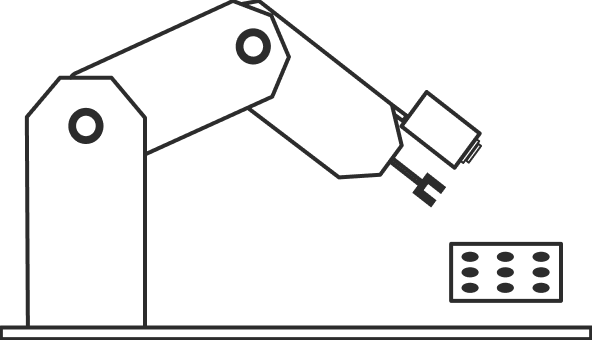
目が手の上(EIH)
カメラがロボットの末端に取り付けられ、フランジ座標系に対して固定されており、カメラはロボットの末端と共に移動します。
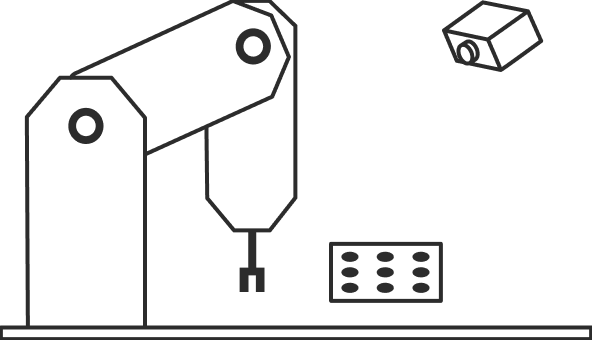
目が手の外(ETH)
カメラが固定位置に取り付けられ、ロボットの基座座標系に対して相対位置が変わりません。
-
点対データ
同じ特徴点がカメラとロボットの2つの座標系で取得される一対の姿勢情報。