データの取得と表示方法
本章では、単発撮影によるデータ取得、連続撮影、データのダウンロード、履歴データの表示、およびデータ表示の調整など、データの取得と表示に関する操作について説明します。
連続撮影データ取得
ソフトウェア画面右下の ![]() アイコンをクリックし、表示される連続撮影設定ウィンドウで撮影間隔を設定し、確認をクリックすると連続撮影が開始されます。
アイコンをクリックし、表示される連続撮影設定ウィンドウで撮影間隔を設定し、確認をクリックすると連続撮影が開始されます。
| 連続撮影中は、カメラパラメータの変更は2回の撮影の合間の空き時間にのみ可能です。パラメータを調整する場合は、十分な撮影間隔を設定してください。 |
リアルタイムデータの表示
機能バーのリアルタイムビューをクリックして、リアルタイムビューウィンドウを開きます。このウィンドウでは、2D画像がリアルタイムで表示されます。

| このウィンドウでは2Dパラメータ(レーザーカメラの場合はLED補助光のオン/オフ)を変更でき、パラメータをリアルタイムで変更してデータの効果を確認することで、適切なパラメータ値を見つけることができます。 |
データのダウンロード
データを取得した後、データをダウンロードできます。ダウンロードをクリックすると、以下の内容をダウンロードできます:
PNG |
カラーまたはグレースケール画像をダウンロードします。 |
PLY |
ポイントクラウド。 |
RAW |
Epic Eyeのデフォルトのデータ保存形式。 |
すべてダウンロード |
上記の3つの形式ファイルを同時にダウンロードします。 |
履歴データの表示
機能バーにある履歴ビューをクリックして、履歴ビューウィンドウを開きます。
履歴ビューには、カメラが取得したデータとそのデータに対応するパラメータが記録されており、時間順に最大20件が保存されます。履歴ビューでは、データのダウンロード、ポイントクラウド表示の調整、深度マップの着色範囲の調整ができます。
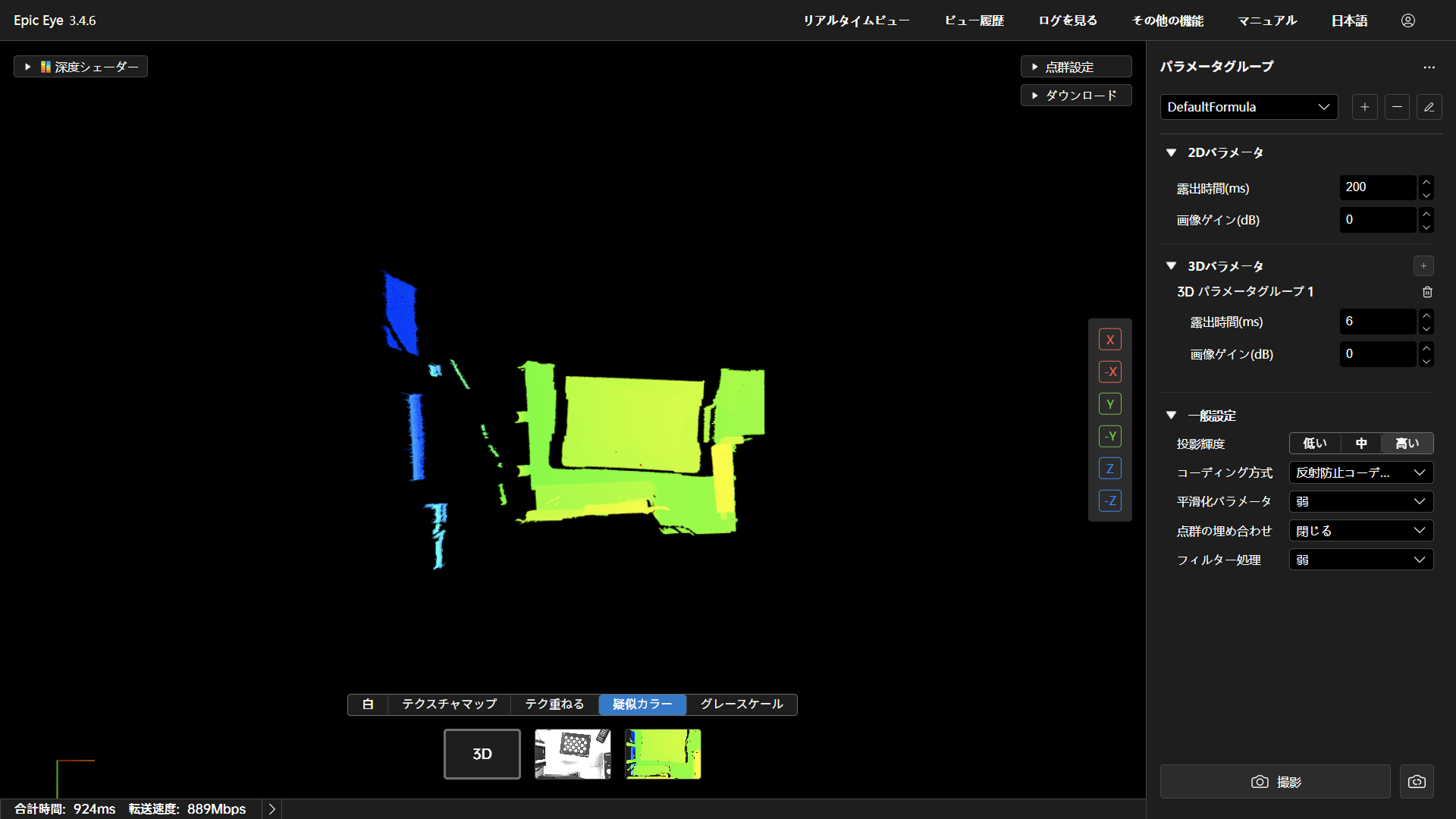
データ表示の調整
ポイントクラウド、2D画像、深度マップの切り替え
ビュー切り替えバーで対応するビューをクリックして、表示されるデータタイプを切り替えます。
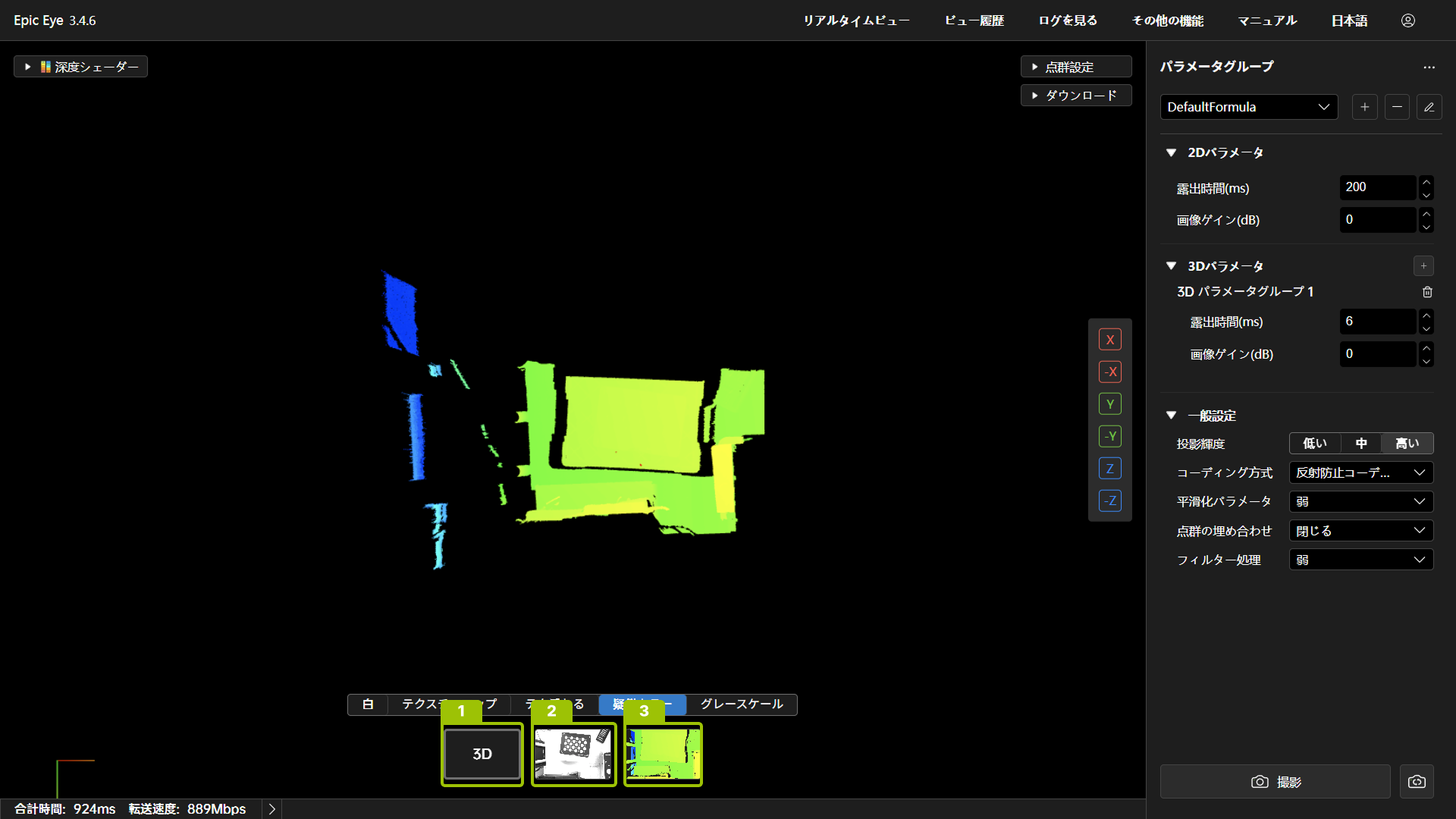
データタイプ |
説明 |
図示 |
|
|---|---|---|---|
1 |
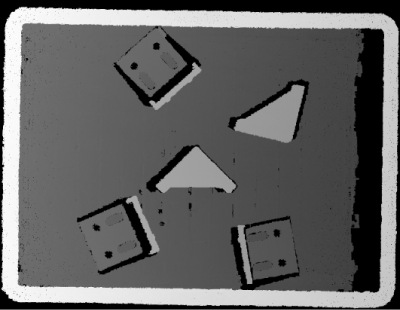
ポイントクラウド |
ポイントクラウドは、物体の表面を表す点の集合です。 |
|
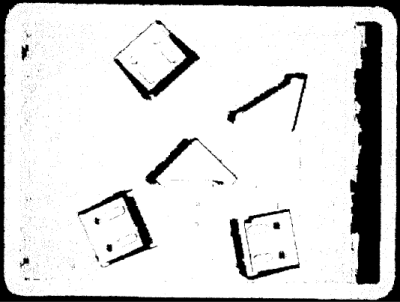
2 |
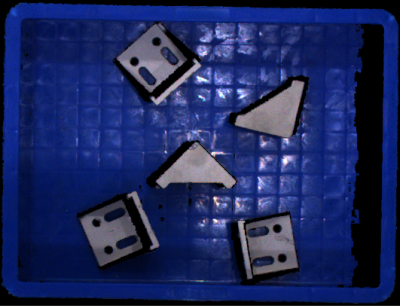
2D画像 |
2D画像はピクセルで構成される通常の2次元画像で、オブジェクトの外観情報をキャプチャするために使用されます。 |
|
3 |
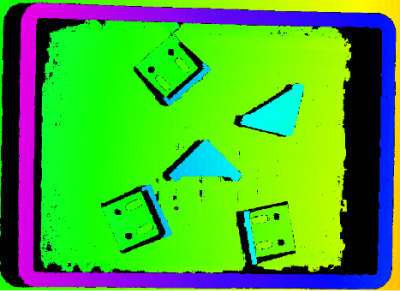
深度マップ |
深度マップは、3Dカメラが取得したシーン内の各点の距離(深度)値をピクセル値として表した画像です。 |
|
ポイントクラウドの調整
ポイントクラウド表示スタイルの切り替え
ビュー切り替えバーでポイントクラウドを選択した後、対応するラベルをクリックしてポイントクラウドの表示スタイルを切り替えます。
ポイントクラウドは以下の表示スタイルをサポートしています:
スタイル |
説明 |
図示 |
|---|---|---|
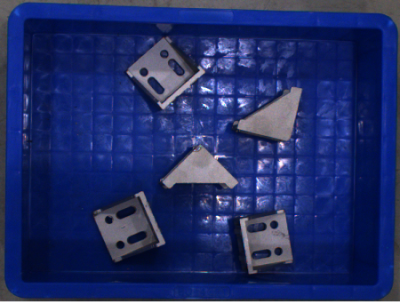
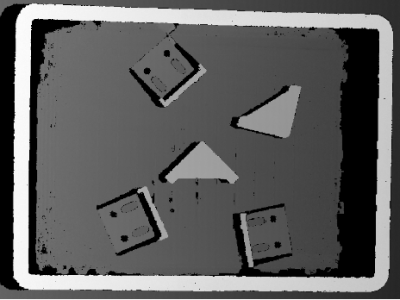
デフォルト |
デフォルトの表示スタイルで、物体の基本形状を表示します。 |
|
テクスチャ |
ポイントクラウドのテクスチャマップを表示して、ポイントクラウドのリアリズムを向上させます。 |
|
疑似カラー |
疑似カラーの色彩マッピングを使用して、ポイントクラウドの属性や特徴を表します。 |
|
グレースケール |
ポイントクラウドをグレースケール画像として表示し、ポイントクラウドの密度と分布を強調します。 |
|

深度の着色範囲の調整
-
説明:
Epic Eyeは取得した深度データに基づいて深度マップの色分布を自動的に調整します。深度シェーダーでは、色分布の深度範囲を手動で調整して、特定の範囲内の深度データの変化をよりよく観察することができます。
-
操作:
-
深度シェーダーをクリックして深度シェーダーパネルを展開します。
-
色域調整モードで手動をクリックします。
-
ビュー内のポイントクラウドや深度マップを左クリックして、情報バーに表示されるZ座標値を確認し、ターゲットオブジェクトのおおよその深度範囲を確認します。
-
スライダーをドラッグするか、最大値と最小値を入力して深度の着色範囲を調整します。
カメラやターゲットオブジェクトの位置が変わった場合は、深度範囲を再確認する必要があります。
-
-
調整例:
ターゲットオブジェクトのZ座標値のおおよその範囲に基づいて深度シェーダーの最大値と最小値を変更すると、ターゲットオブジェクトの深度データの変化を確認できます。