🔄Release Notes
ATOM v1.3.1 Release Notes
|
This version requires Epic Pro v1.3.1. Please ensure you have the correct version installed before upgrading. |
Feature Additions and Optimizations
File Management Window
-
Windows and Ubuntu systems can access files and file paths in the local user directory; smart cameras are only allowed to access data storage folders
-
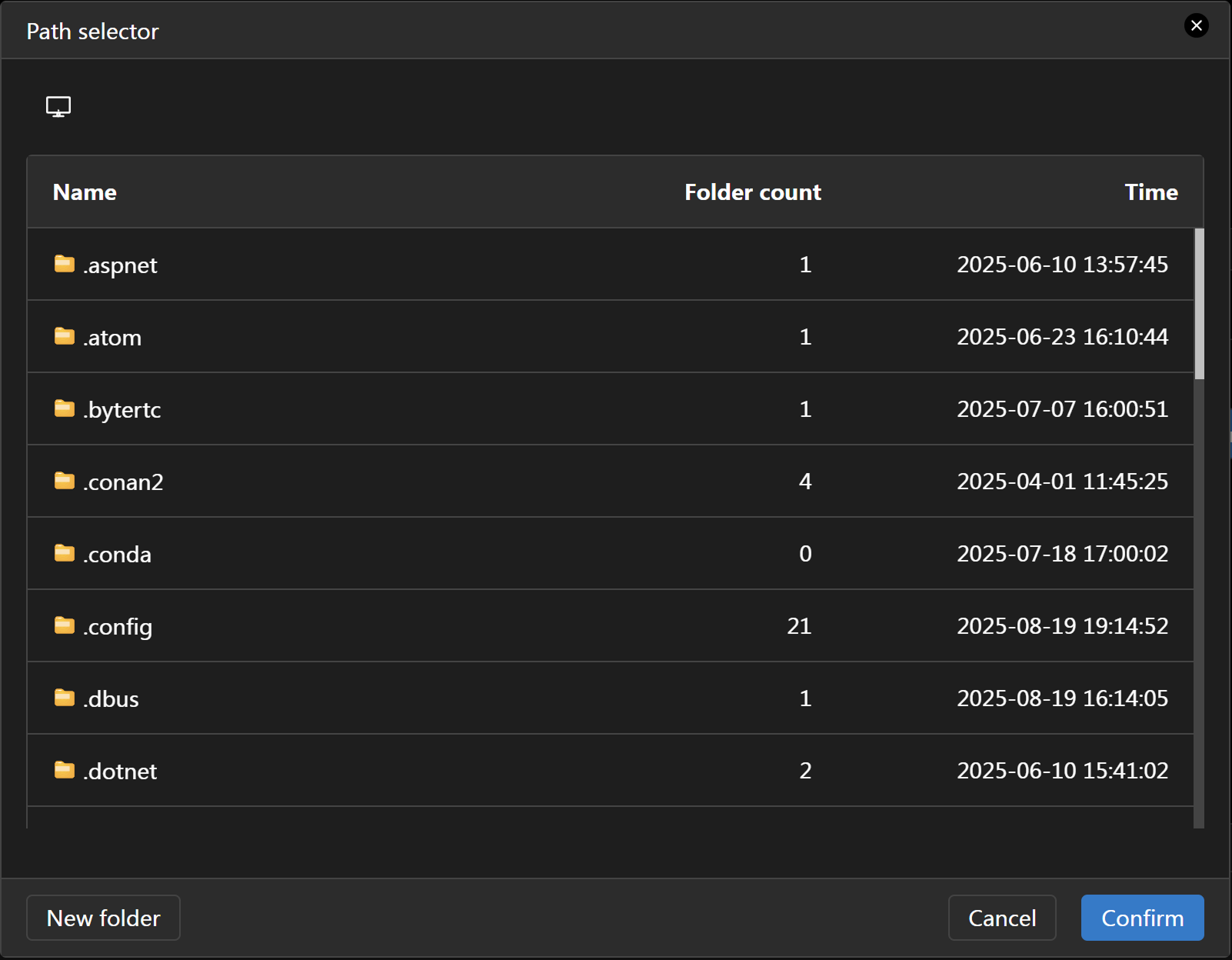
All parameters involving folder path selection, such as save operators, can be configured through the path selector window to select or create storage paths, supporting access to local and remote server file paths
| File Management Interface | Empty State Interface |
|---|---|
|
|
FTP Data Transmission
-
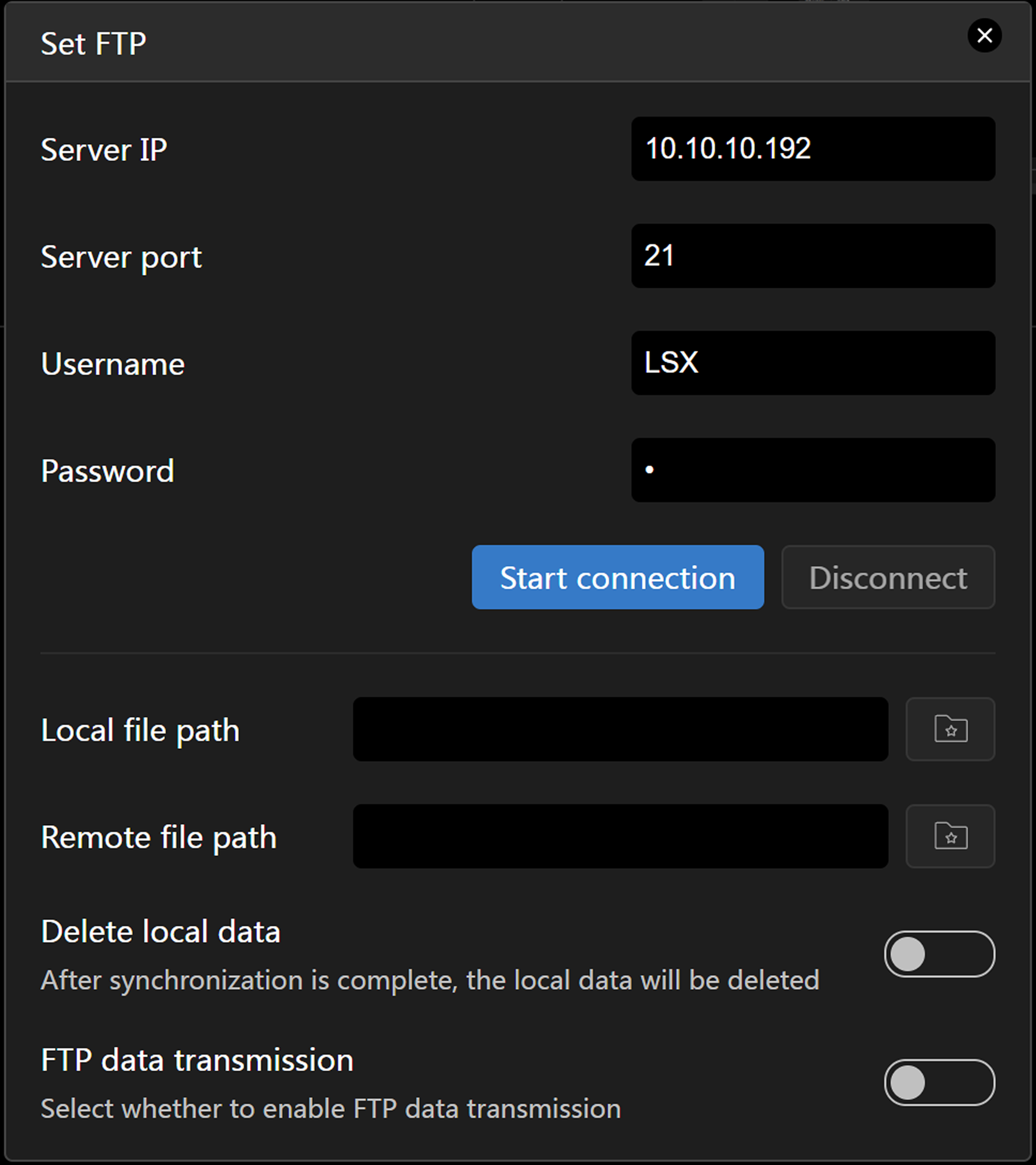
Added FTP data transmission functionality; Windows, Ubuntu, and smart cameras can all write local data to remote server devices on the LAN in real-time after configuration
| FTP Configuration Interface | FTP Transmission Interface |
|---|---|
|
|
Configuration Steps:
-
Ensure the FTP remote server is enabled
-
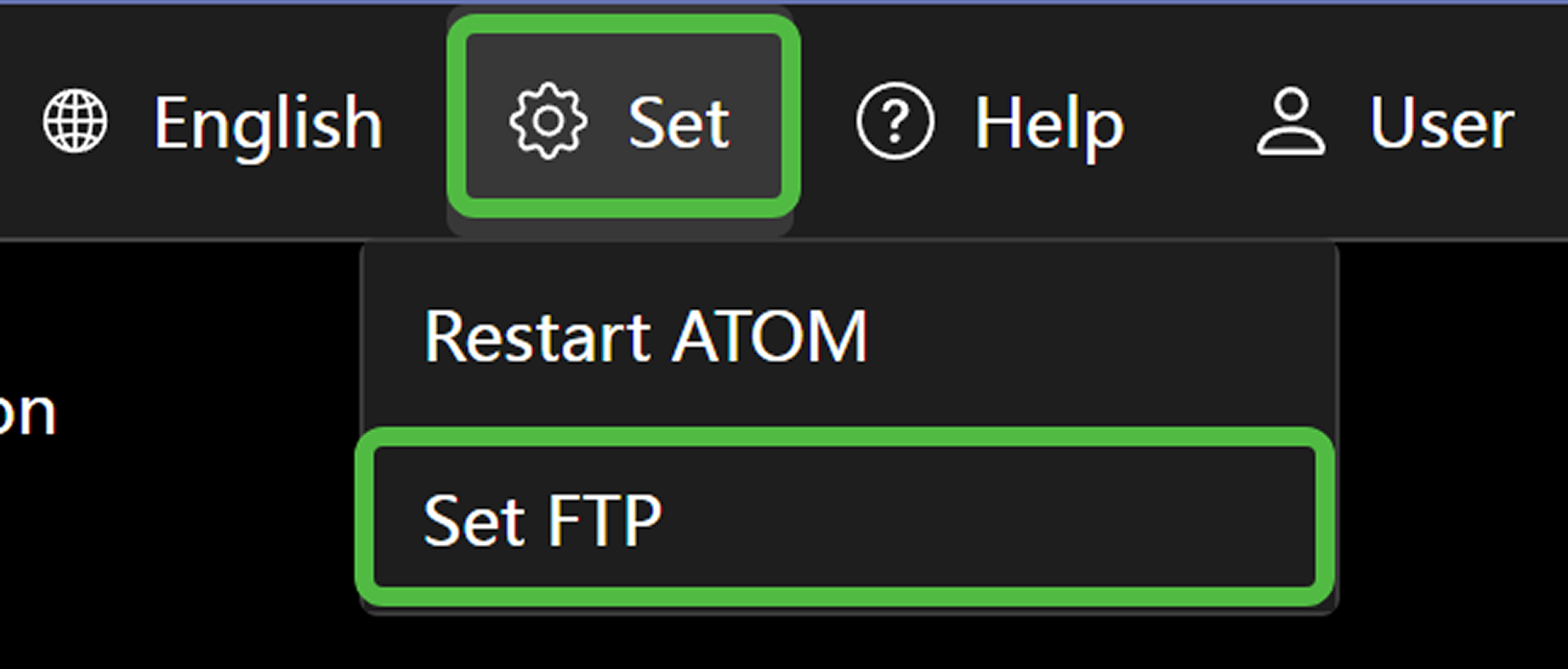
Click "Set FTP" in the home page settings
-
Fill in remote server information:
-
IP Address
-
Port (default 21)
-
Username
-
Password
-
-
Click "Enable Connection"
-
Proceed with subsequent configuration after successful connection
Feature Characteristics:
-
FTP data transmission is enabled by default
-
After setting local and remote file paths through the path selector, files will be synchronized and transmitted in real-time
-
Option to automatically delete local data after transmission completion
-
Home page FTP configuration takes global effect; once enabled, all newly saved files to specified local paths will be automatically transmitted to remote servers
-
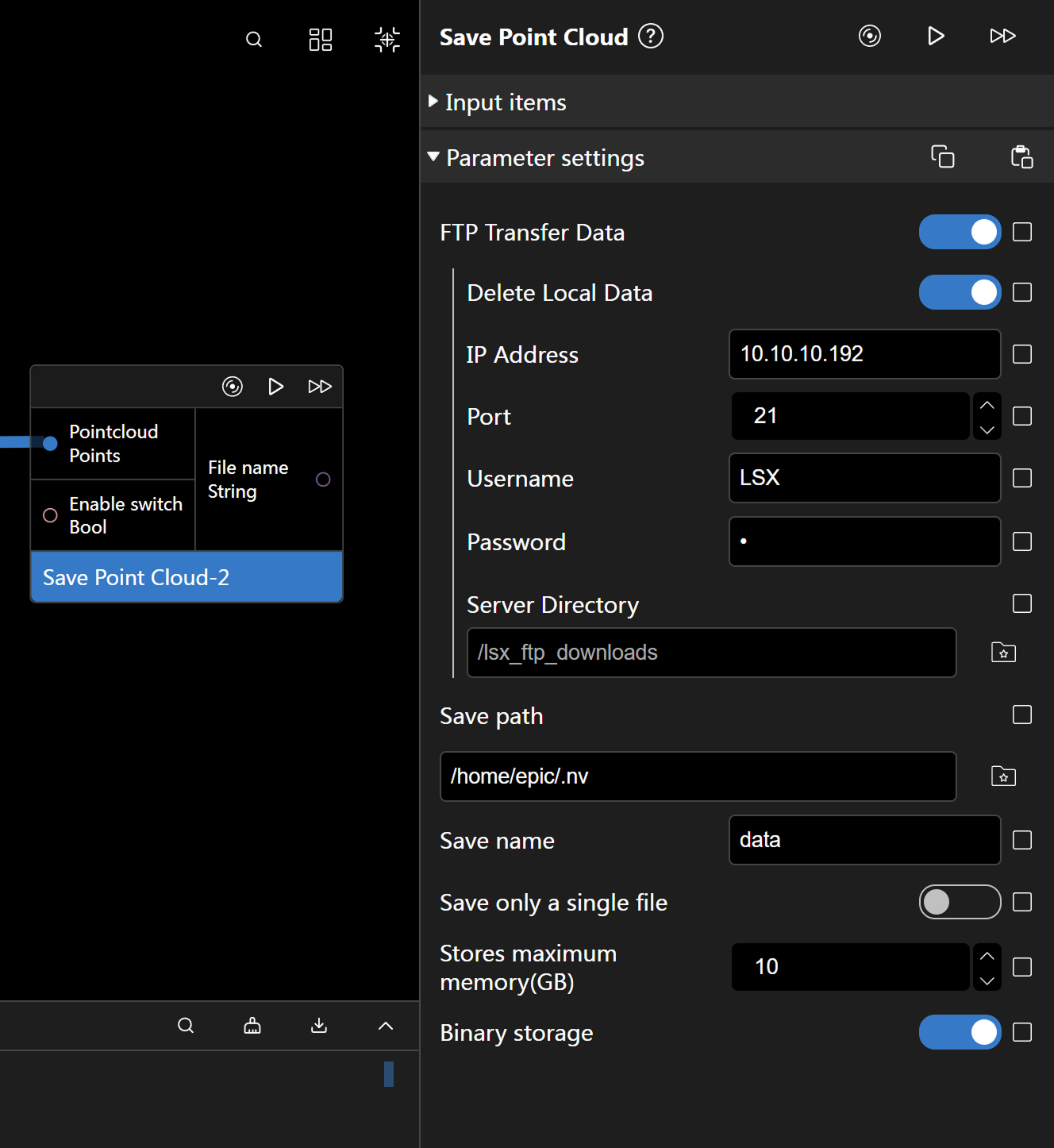
In addition to global FTP configuration, save file operators support independent FTP data transmission parameter configuration, enabling transmission of specific files or synchronization to different remote servers
|
When configuring FTP parameters for individual operators, after filling in IP address, port number, username, and password, click the "Initialize" button first to establish connection with the server. Only after successful connection can server directory configuration be performed. |
Deep Learning Framework Optimization
-
Upgraded deep learning underlying framework and optimized algorithm library; for YOLO-related operators, it is recommended to use .pt models when GPU is enabled, which can significantly reduce memory and VRAM usage
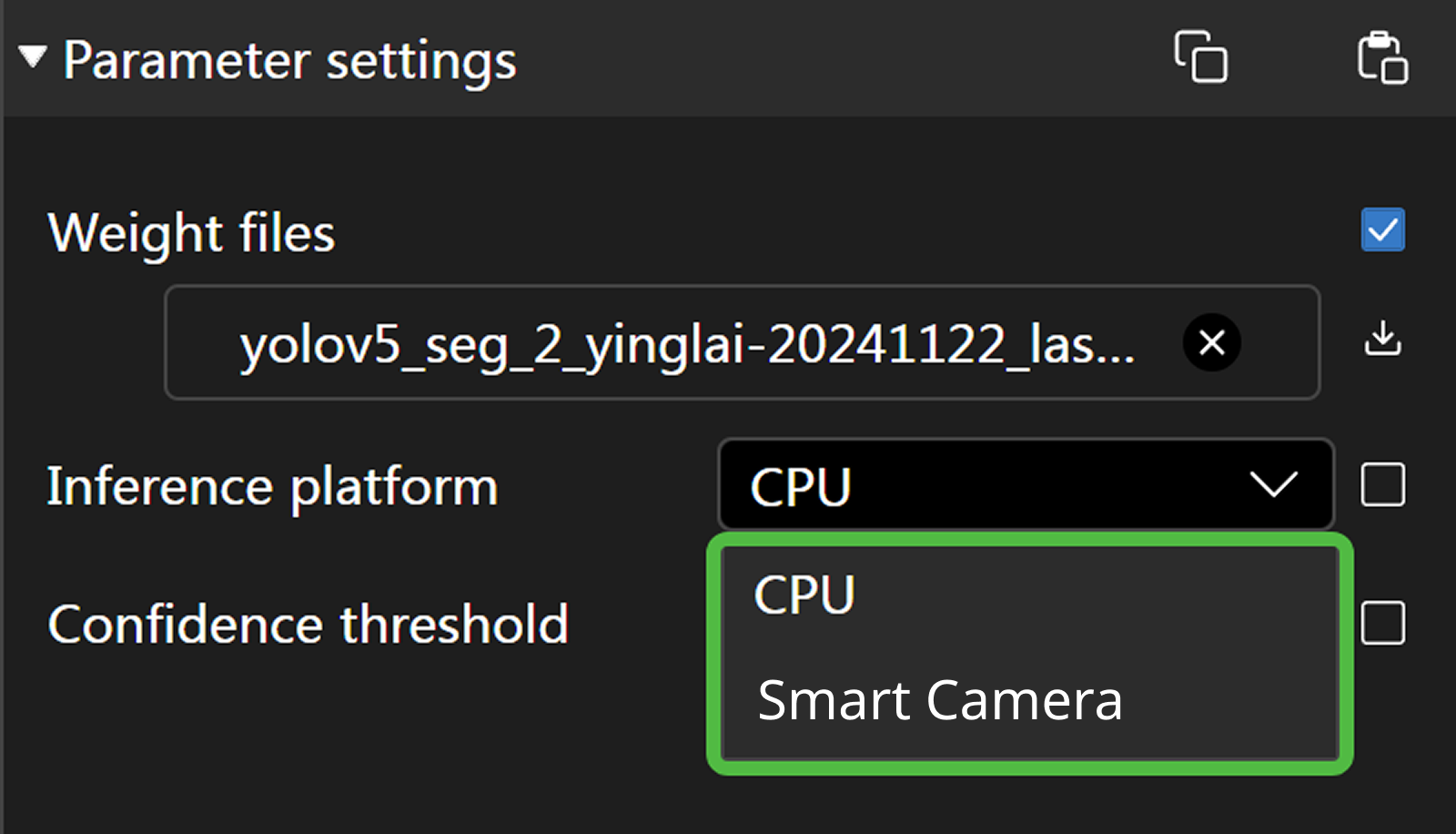
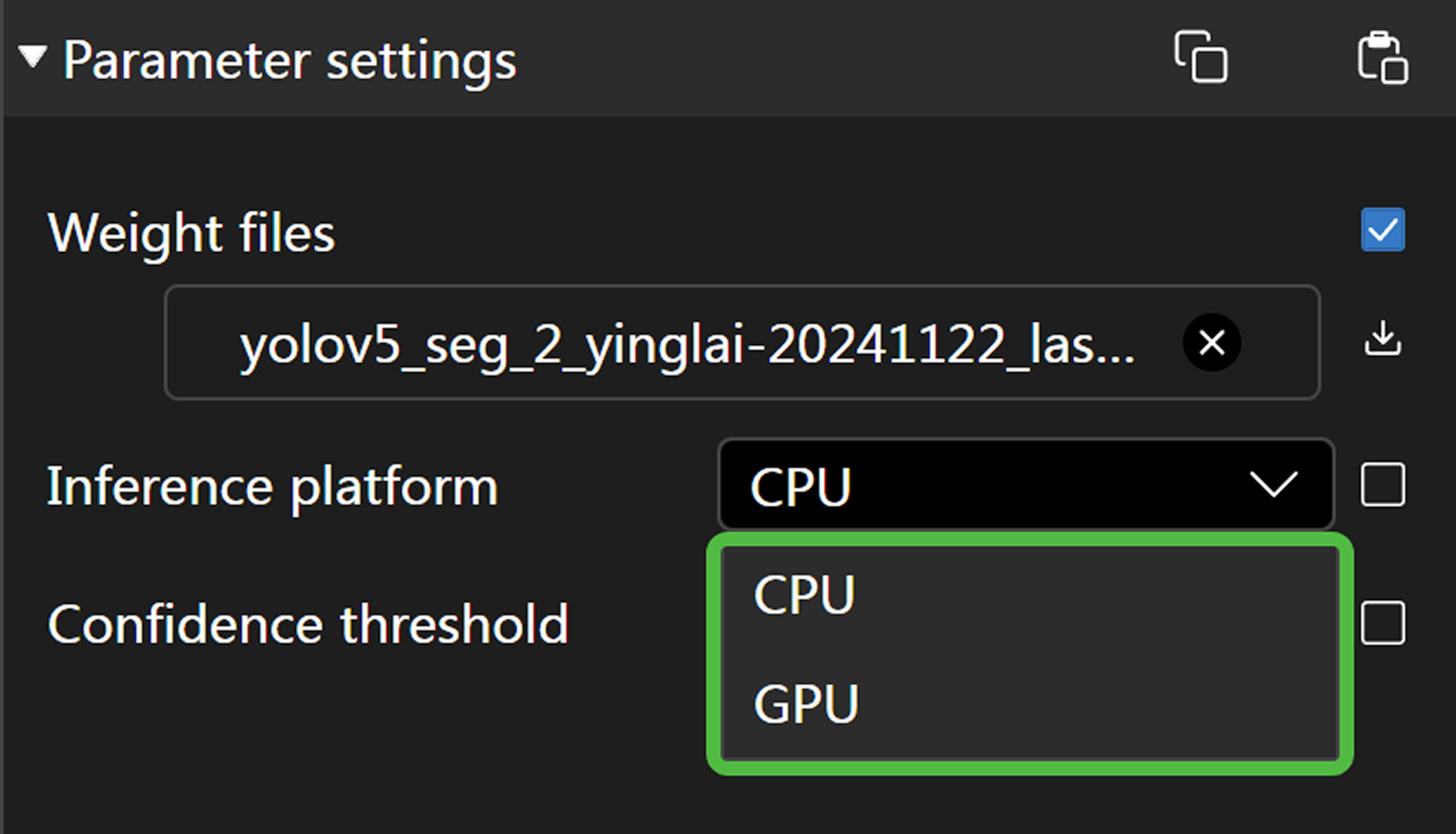
-
Optimized YOLO algorithm-related operator acceleration functionality, providing three dropdown options: Smart Camera, CPU, GPU, with automatic model data format checking that will report errors for incompatible options
| Inference Platform Configuration | Inference Platform Configuration 2 |
|---|---|
|
|
Operator Additions and Optimizations
Operator Acceleration
For ordered point clouds, radius filtering, normal estimation, and edge extraction operators have been optimized, showing significant performance improvements compared to the previous version:
| Operator Name | Previous Version Average Time (ms) | v1.3.1 New Version Average Time (ms) | Time Reduction | Speed Improvement |
|---|---|---|---|---|
Radius Filtering |
2868 |
260 |
90.93% |
🔺 11x |
Radius Filtering (with Normals) |
1200 |
298 |
75.17% |
🔺 4x |
Point Cloud Normal Estimation |
3023 |
390 |
87.10% |
🔺 7.8x |
Point Cloud Edge Extraction |
2730 |
165 |
93.96% |
🔺 16.6x |
New Operators
| New Operator Name | Function Description | Operator Diagram |
|---|---|---|
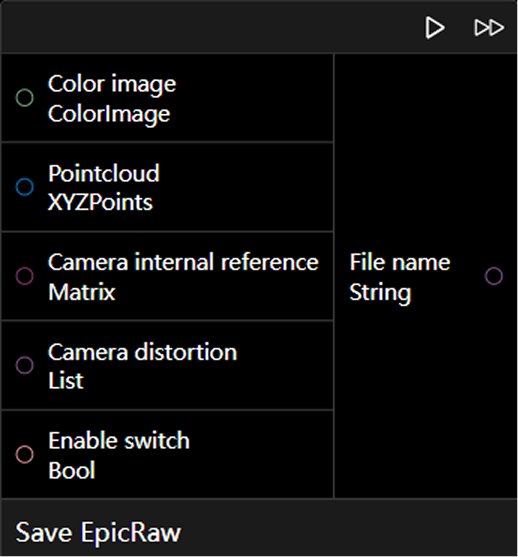
Used to control the location, naming method, and storage management of EpicRaw file saving. |
|
|
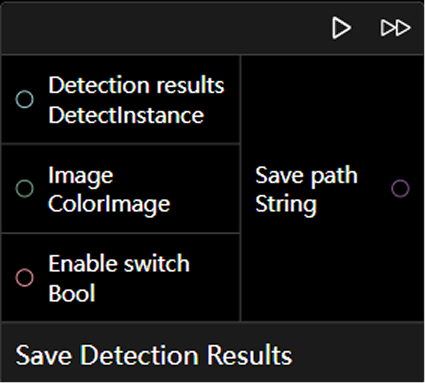
Saves detection results generated in image detection processes and corresponding original image data locally, can be used for uploading to migration annotation platforms. |
|
|
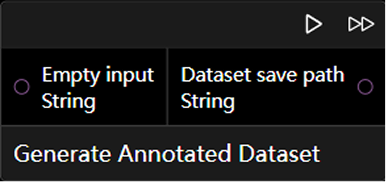
Generates labeled datasets in specific formats, can be used for uploading to migration annotation platforms for training deep learning models. |
|
|
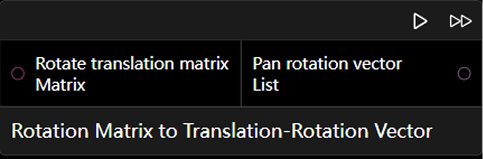
Facilitates conversion to more universal rotation vector data format compatible with Epic Pro. |
|
|
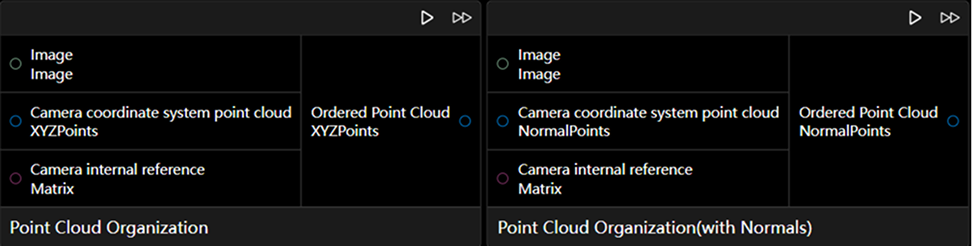
Converts unordered point clouds to ordered point clouds, includes parameter for aligning with image dimensions. |
|
|
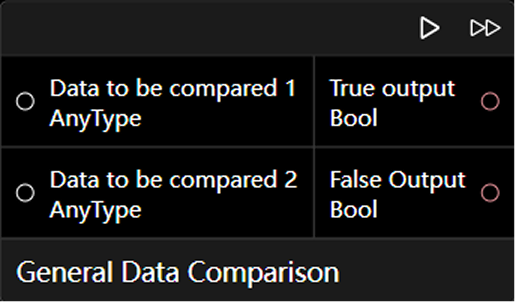
Supports comparison of any two property values of the same data type or their sub-properties, outputs boolean results based on set conditions (such as greater than, less than, equal to), flexibly applicable to various scenarios such as process control, conditional triggering, and data comparison |
|
|
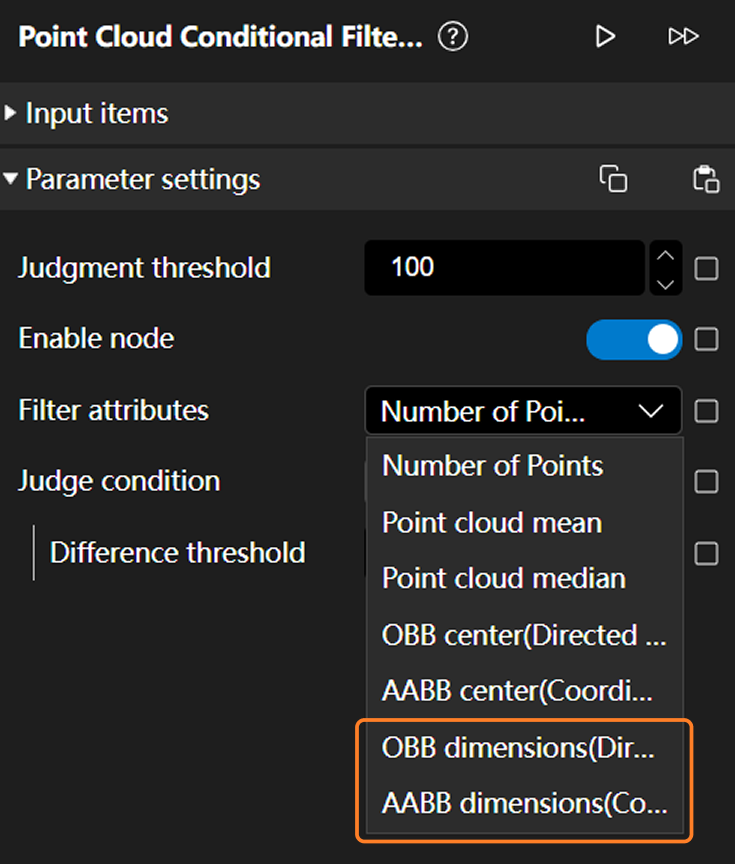
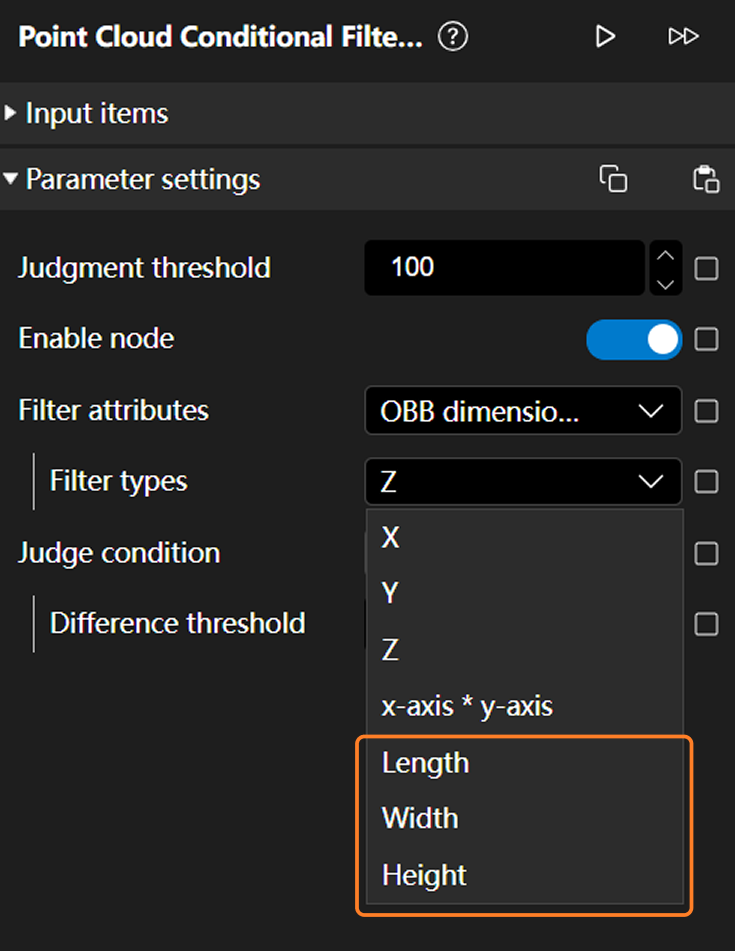
Supports filtering by bounding box "length, width, height". When the filter attribute is set to "Oriented Minimum Bounding Box Size" or "Axis Aligned Bounding Box Size", the filter type parameter can select "length, width, height" for filtering |
|
Professional Operator Functions
General Data Comparison Operator
Added General Data Comparison operator, supporting comparison of any two property values of the same data type or their sub-properties. Outputs boolean results based on set conditions (such as greater than, less than, equal to), flexibly applicable to various scenarios such as process control, conditional triggering, and data comparison.
Point Cloud Conditional Filter Operator
Point Cloud Conditional Filter operator supports filtering by bounding box "length, width, height". When the filter attribute is set to "Oriented Minimum Bounding Box Size" or "Axis Aligned Bounding Box Size", the filter type parameter can select "length, width, height" for filtering.
 |
 |
|---|
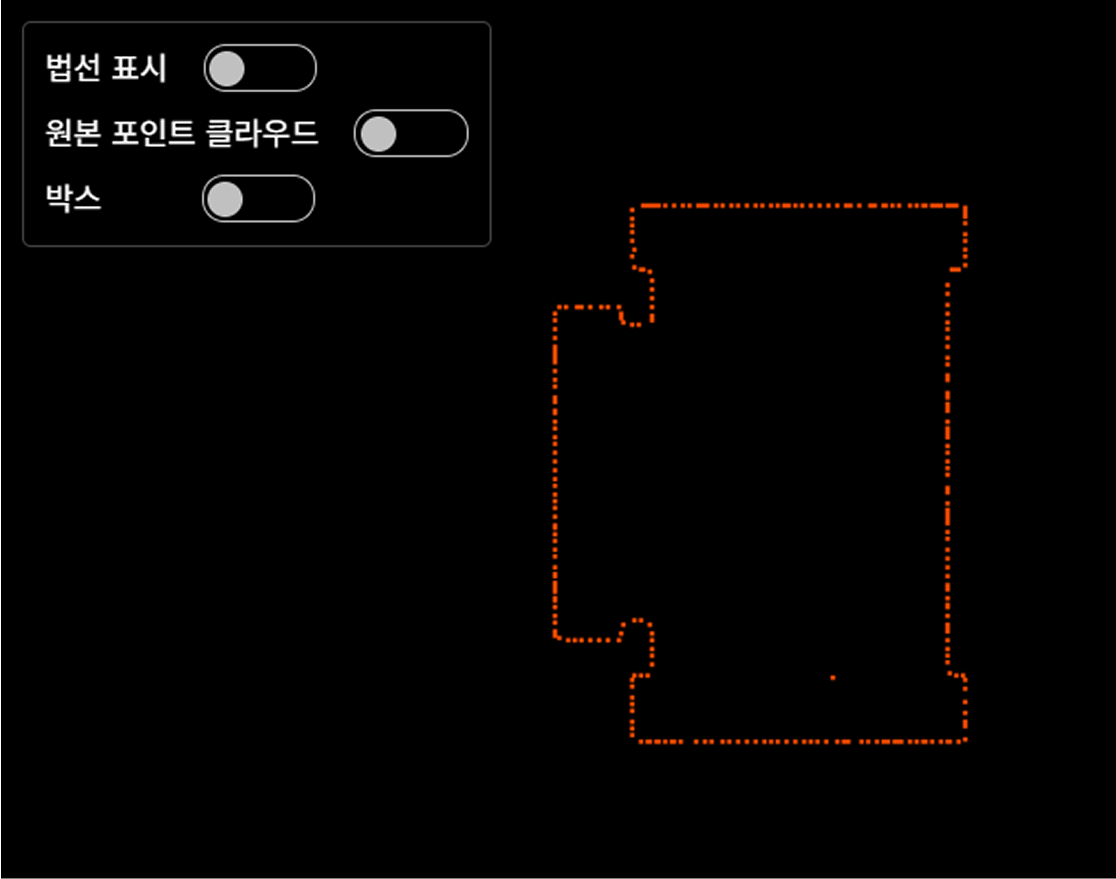
New "With Normals" Operators
To facilitate subsequent algorithm integration of point cloud data processing with and without normals, streamline operator quantity and reduce usage difficulty, the current version has unified optimization and adjustment of point cloud-related processing operators, adding the following "with normals" operators:
Point Cloud Edge Extraction with Normals (Longitude-Latitude Scanning Method) |
|
Operator Name Optimization
Optimized some operator names that were difficult to understand or prone to ambiguity, and performed deletion and merging of operators with overlapping functional effects:
| Original Name | v1.3.1 New Version |
|---|---|
Canny Image Edge |
|
Bag Segmentation |
|
Box Detection / Box Detection ONNX |
|
SAM Prompt Segmentation |
|
FastSAM Prompt Segmentation |
|
GroundDINO Prompt Detection |
|
Restrict Pose Orientation |
|
Point Cloud Top Layer Filtering (Based on Inclined Top Layer Height) |
|
Point Cloud Top Layer Filtering (Based on Surrounding Upper Points) |
Extract Top-layer Point Clouds(based on surrounding upper-level points) |
Point Cloud Top Layer Filtering (Based on Top Layer Height) / Point Cloud Top Layer Filtering (Based on Upper Points in ROI) |
|
Point Cloud Compression to Plane / Point Cloud Compression to Plane (with Normals) / Point Cloud Projection Filtering / Point Cloud Projection Filtering (with Normals) |
Parameter Name Optimization
-
This adjustment includes parameters for some professional algorithm terms to facilitate better understanding and usage:
Original Parameter Name New Parameter Name IOU Threshold
Overlap Filtering Threshold
Sobel Operator Size
Edge Detection Window Size
-
Optimized "Bounding Box Expansion Pixels" parameter configuration for "Detection Result Extraction" operator, changed from pixel position to percentage expansion
Operator Documentation
|
Documentation has currently completed rewriting of 58 basic operators, covering over 80 commonly used operators. Documentation will continue to be supplemented and improved, with added visual comparisons of different parameter adjustment effects to intuitively demonstrate the differences in effects of different parameter adjustment operations, helping users better understand and utilize each operator. |
The new operator documentation helps users comprehensively understand operator functions and usage methods, mainly including the following parts:
-
Introduction to ATOM operator function descriptions (core functions and basic principles), usage scenarios (typical scenarios in practical applications), input and output items
-
Explanation of each configurable parameter of operators, including parameter descriptions (parameter functions and basic principles), parameter adjustment descriptions (parameter adjustment effect descriptions and experience tips), and parameter ranges (parameter value ranges, default values, and units)
-
Some operators have additional notes, such as operator version descriptions, data requirements, and installation dependencies
Interaction Optimizations
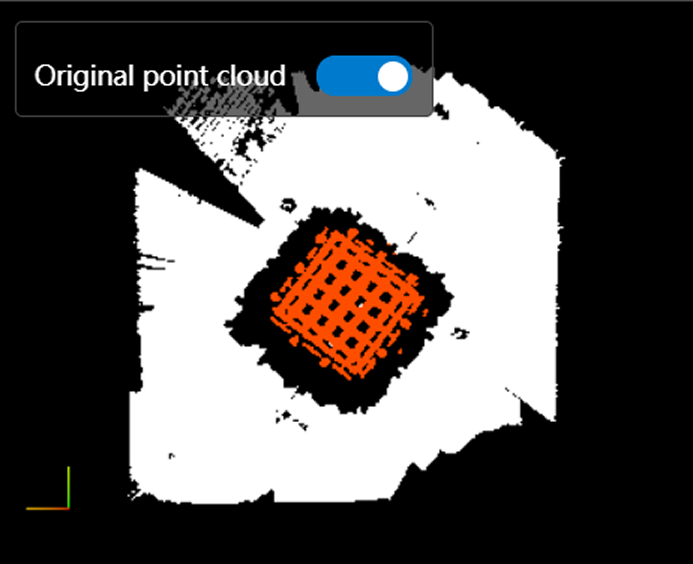
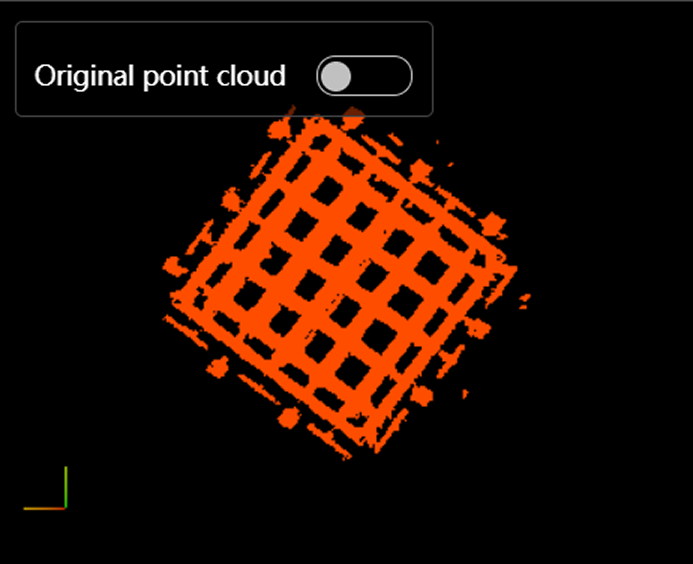
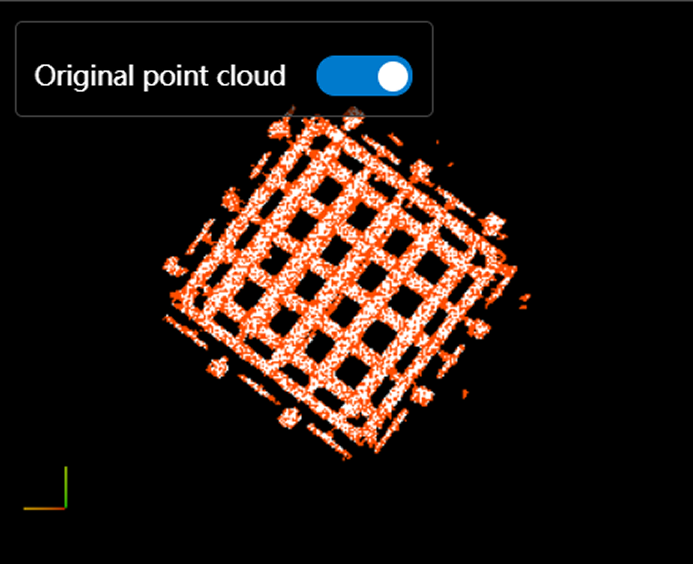
Point Cloud Visualization Comparison
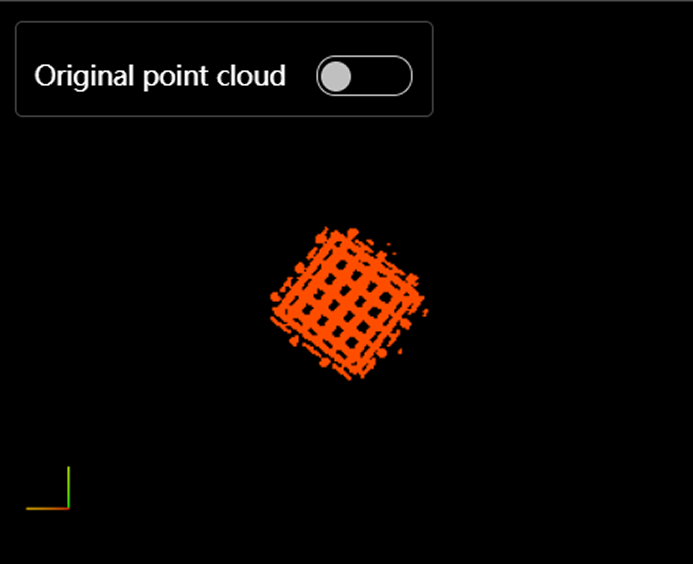
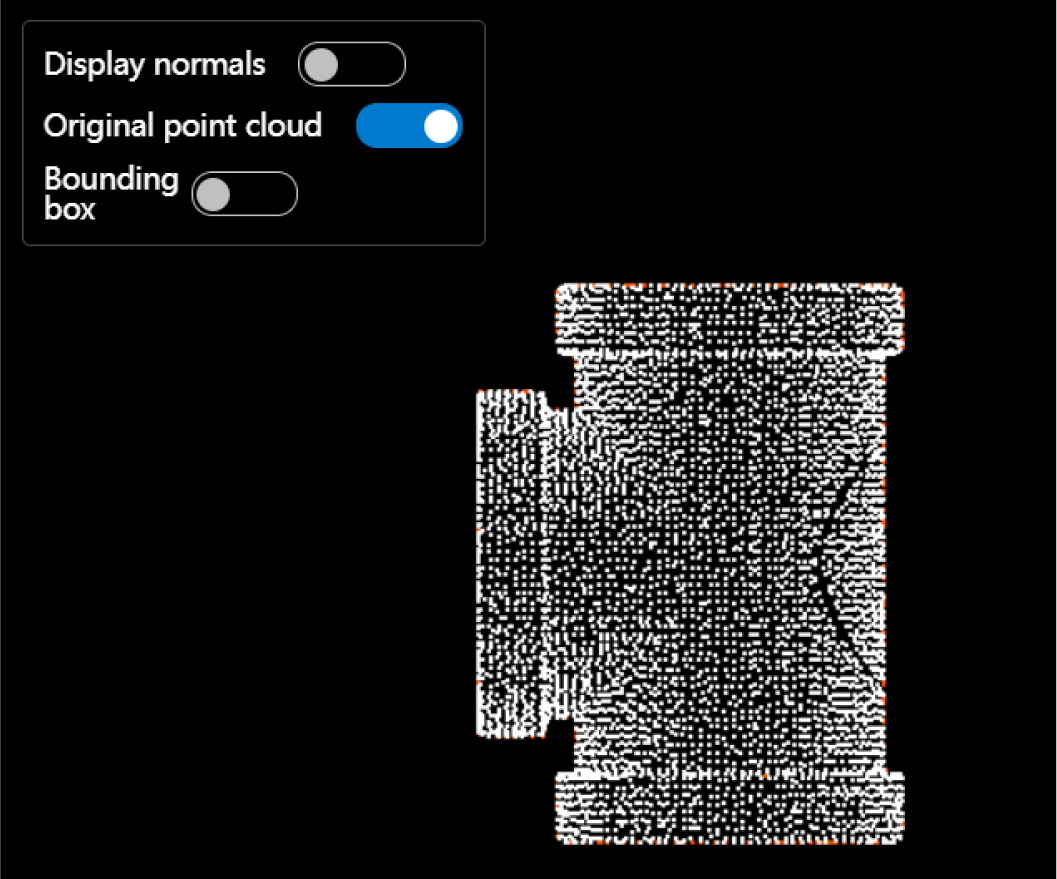
To facilitate visual comparison of input and output point cloud effect differences, an "Original Point Cloud" display toggle has been added to all views involving point cloud processing operator outputs, enabling more intuitive comparison of input original point clouds and processed output point clouds. The "Original Point Cloud" is disabled by default:
| Example Operator | Output Point Cloud (Original Point Cloud Display Disabled by Default) | Output Point Cloud (Original Point Cloud Display Toggle Enabled) |
|---|---|---|
Point Cloud ROI |
|
|
Point Cloud Downsampling |
|
|
Point Cloud Edge Extraction |
|
|
Parameter Management Optimization
To simplify parameter management and improve operational convenience, making parameter viewing and debugging more intuitive:
-
Parameter settings no longer distinguish between "Initialization Parameters" and "Runtime Parameters", unified and merged into parameter items
-
Parameter mapping table merges original "Initialization" and "Runtime" into "Parameter List"
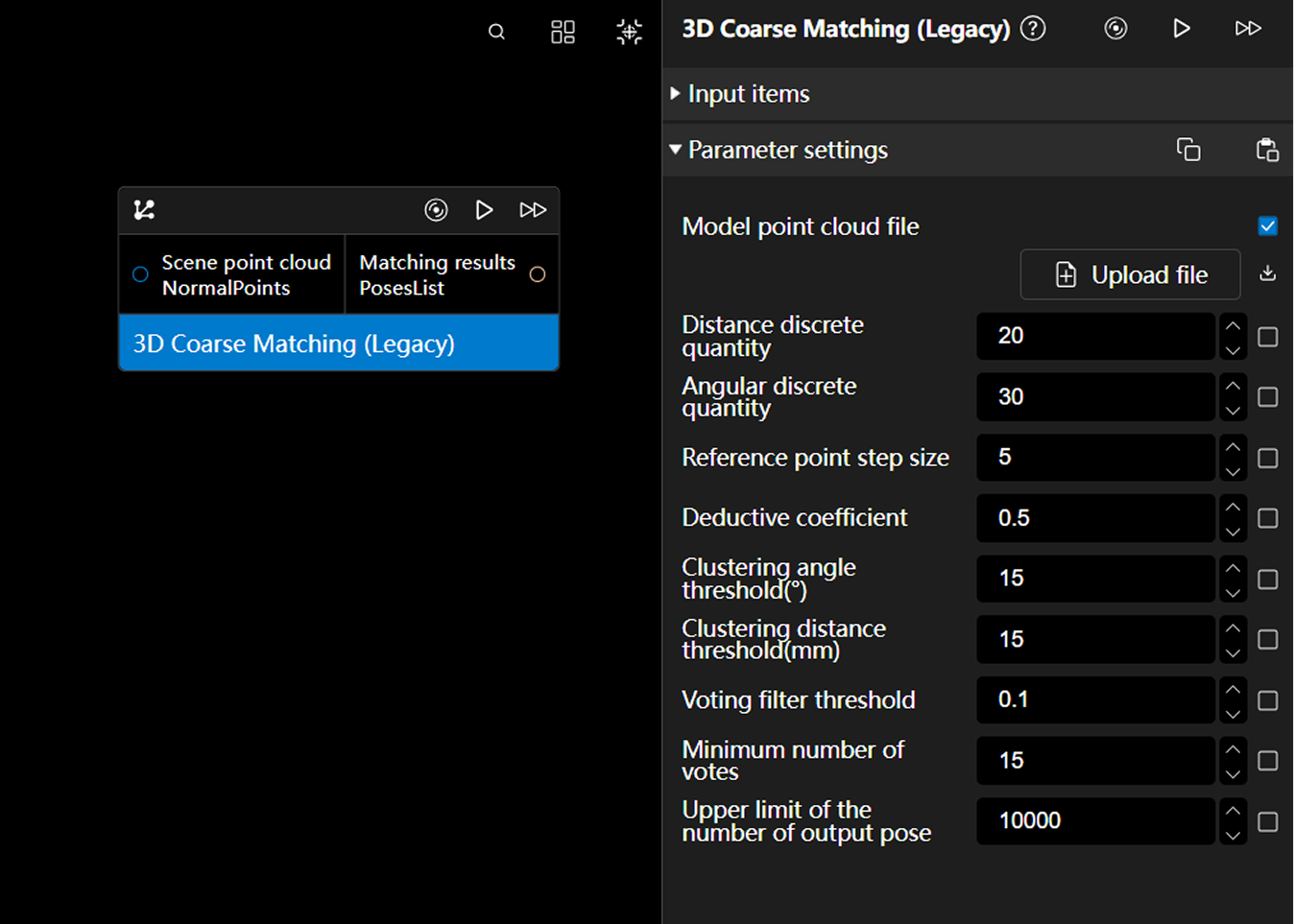
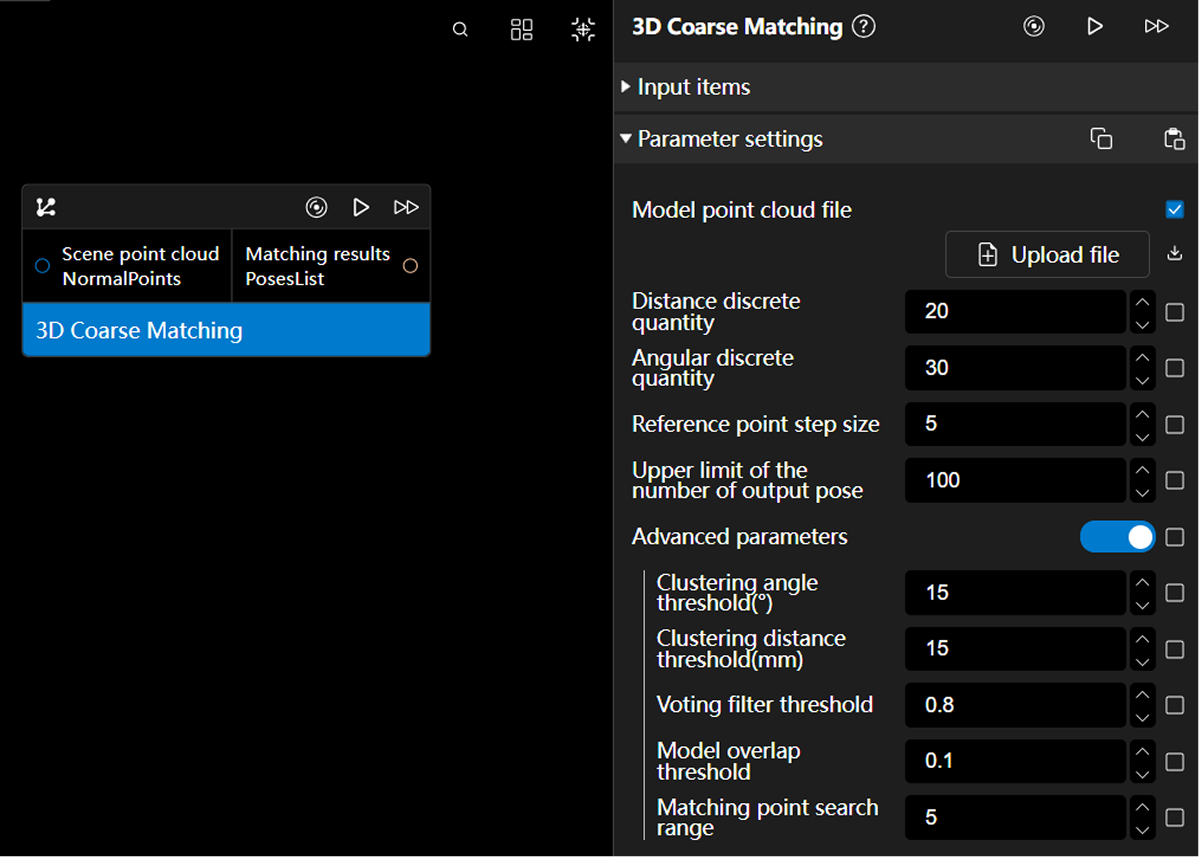
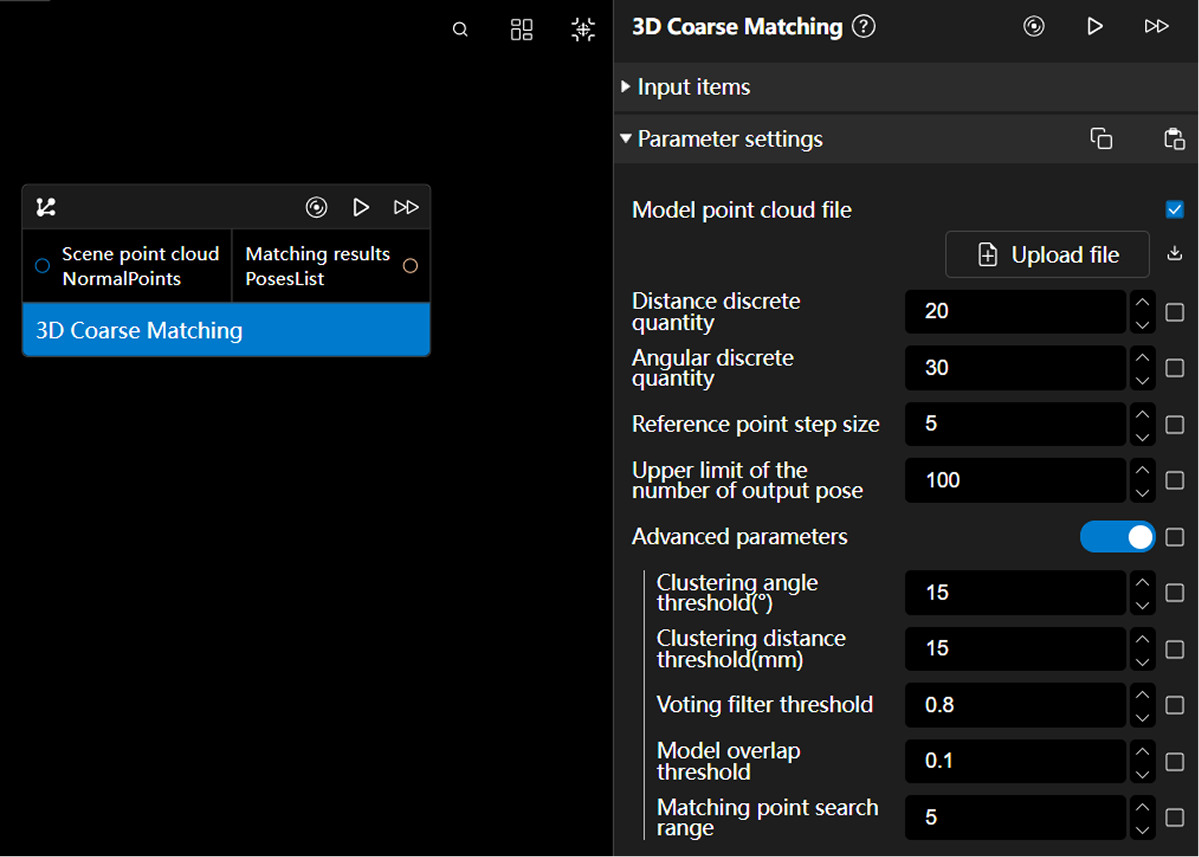
| Using [3D Coarse Matching] operator as an example | ||
|---|---|---|
Previous Version Parameter Settings |
v1.3.1 New Version Parameter Settings |
|
|
|
|
Export Function Enhancement
When exporting algorithm graphs, a new associated file list selection window has been added, allowing users to decide whether to package and export model or weight files with the algorithm graph by checking:
Parameter Mapping Location
Parameter mapping table has added "Location" functionality, supporting one-click quick location to the position of the operator in the canvas that the selected mapped parameter belongs to. The operator will be centered and highlighted in "cyan":
Canvas Interaction Optimization
-
Searching keywords in the canvas will highlight matched operators in "yellow"; clearing keywords or closing the search function will clear the highlight state
-
Holding Ctrl + left mouse button allows continuous clicking to multi-select operators; selected operators display "purple" highlight, enabling synchronized movement or batch operations on multi-selected operators; double-clicking the canvas clears the multi-select state
Startup Experience Optimization
-
In Ubuntu systems, software can be opened by left-clicking the tray icon or right-clicking the secondary menu "Open ATOM"
-
Browser page automatically opens after ATOM background startup is successful
-
Limits single operator runtime; processes are stopped and error alerts are shown when runtime exceeds 30 seconds
Smart Camera Adaptation
Deep learning framework adapted for smart camera ARM chips, YOLO-related operators can achieve NPU acceleration
Issue Fixes
-
Fixed [YOLOv8/v10 Detection and Segmentation] operator errors when setting epicnn models and enabling GPU due to environment configuration or dependency issues, as well as unstable output results and inability to use GPU normally in some environments
-
Updated installation package environment dependencies, fixed operator import failure issues in Ubuntu systems
-
Fixed potential errors and multiple loading issues when importing multiple operators simultaneously
-
Fixed issues where importing operators with the same name multiple times failed to correctly load new code
|
Please modify @register.register() to @register.register(force_cover=True) before custom operator class names before importing. |
-
Fixed inability to delete deprecated operators in subgraphs and runtime freezing issues when deprecated operators exist
-
Fixed 3D coarse matching node runtime crashes when models do not calculate normal vectors
-
Fixed smart camera ATOM page restart button insufficient permissions causing inability to use normally
-
Fixed 3D coarse matching (legacy) node errors when input point count is too low and point count after downsampling is below reference step size
-
Fixed issues where normal estimation and edge extraction nodes have too small calculation ranges when point cloud invalid points are filled with 0, causing increased time consumption and inaccurate results
-
Fixed rotation pose data splitting operator incorrect direction vector splitting
-
Fixed general condition judgment outputting incorrect judgment results when inputting empty strings
-
Fixed ATOM main graph VRAM release mechanism not taking effect when it doesn’t contain deep learning operators
-
Fixed issues where adding models in grasp configuration sometimes prompts model path errors or model non-existence
-
Optimized VRAM management, fixed potential VRAM overflow issues when Epic Pro switches deep learning model configurations
-
Fixed frontend display anomalies for deleted operator input connections
-
Fixed issues where PowerShell pages don’t automatically close during runtime on some Windows systems
-
Fixed errors in edge extraction, coarse matching, convex hull calculation, and other operators when input point count is too low
-
Fixed Windows 10 Professional frontend interface white screen issues when opening
-
Fixed "General Condition Judgment" operator runtime parameters unable to map to Epic Pro frontend
-
Fixed inaccurate results in "Remove Duplicate Point Cloud", "Local Point Cloud Removal", and "Remove Model Matching Point Cloud" operators when point cloud overlap is very high, while reducing runtime
-
Fixed "Update Grab Point Position Coordinates" operator output result error
-
Fixed "General Condition Judgment" operator errors when model name is empty
-
Fixed ATOM startup errors on some devices
-
Fixed "Update Grab Point Position Coordinates" operator output result error
-
Fixed numerical calculation operator errors when input is empty and cannot use single operand calculation
-
Fixed grab point sorting operator output is empty when sorting strategy is not set