如何采集与查看数据
本章介绍采集与查看数据的相关操作,包括单次拍照采集数据、连续拍照采集、下载数据、查看历史数据以及调整数据显示。
连续拍照采集数据
单击位于软件界面右下角的 ![]() ,在弹出的连续拍照设置窗口中设置拍照时间间隔,单击确认后,进行连续拍照。
,在弹出的连续拍照设置窗口中设置拍照时间间隔,单击确认后,进行连续拍照。
| 在连续拍照过程中,相机参数只能在相机进行两次拍照的空余时间间隔进行修改。如需调整参数,请确保设置足够的拍照间隔时间。 |

查看历史数据
单击位于功能栏的历史视图,打开历史视图窗口。
历史视图中记录了该相机采集的数据,以及采集该数据对应的参数,按时间顺序共留存20张。此外,在历史视图中可下载数据、调整点云显示、调整深度图的着色范围。
调整数据显示
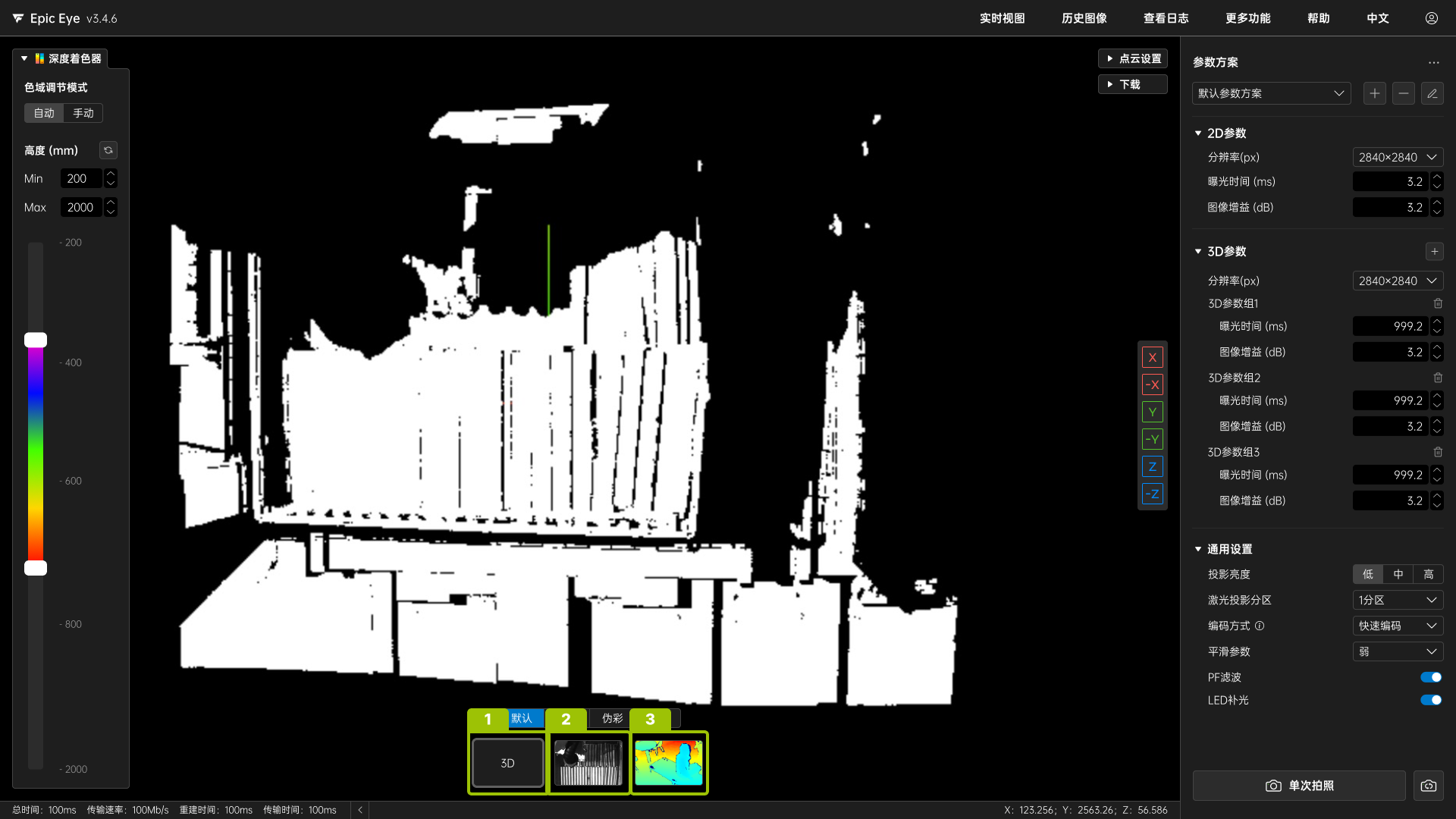
切换点云、2D图、深度图
在视图切换栏中,单击对应的视图即可切换显示的数据类型。
数据类型 |
说明 |
图示 |
|
|---|---|---|---|
1 |
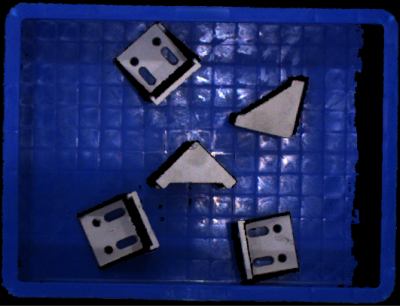
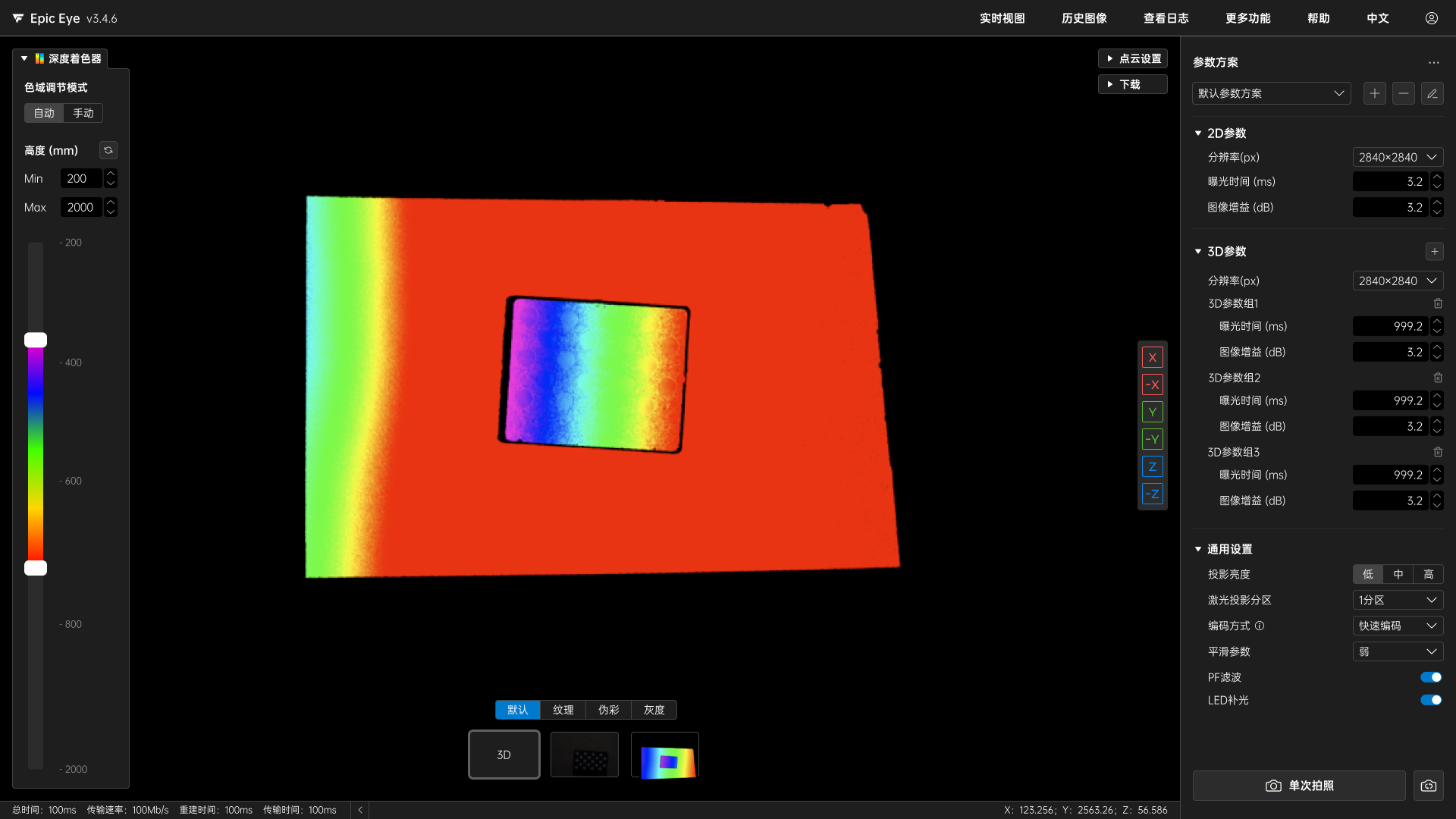
点云 |
点云是物体外观表面的点数据集合。 |
|
2 |
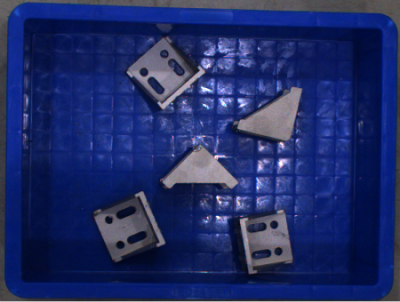
2D图 |
2D图是常规的二维图像,由像素组成,用于捕捉对象的外观信息。 |
|
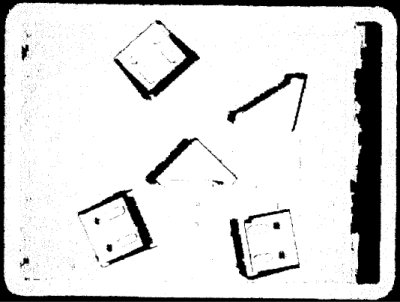
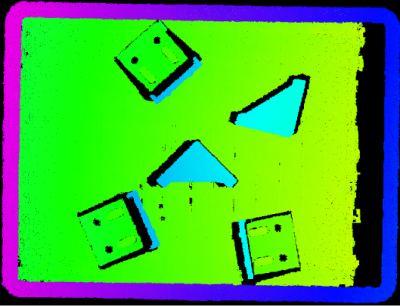
3 |
深度图 |
深度图是指3D相机采集到的场景中各点的距离(深度)值作为像素值的图像。 |
|