Robot Singularities
Introduction
In robot kinematics, singularities refer to situations where inverse kinematics encounters no solution, multiple solutions, or extremely high sensitivity when robots are at certain specific spatial positions or orientations. At these points, the robot end effector’s (TCP) position and orientation cannot be uniquely and stably mapped to joint rotation angles, leading to decreased control precision or even loss of control.
For most 6-axis articulated robots, due to mechanical or software limit restrictions, situations arise in their motion space where inverse kinematics has no solution, meaning coordinate-based planned motion cannot be clearly converted inversely to rotation angles of robot joint axes. These points with no inverse kinematics solutions in robot workspace are called "singularities." Robot singularities can be roughly divided into the following three types.
Shoulder Singularity
Shoulder singularity occurs when the robot wrist center and J1 axis joint are on the same straight line. When the robot "shoulder" - the first joint axis (J1) and wrist center connection are collinear, the robot structure loses degrees of freedom in the horizontal direction. At this time, J1 and the fourth joint axis (J4) become coupled, causing both to need "instantaneous" large rotations to maintain end effector orientation, leading joint axes 1 and 4 to attempt instant 180-degree rotations. This situation is similar to when a person’s shoulder and forearm are completely straight in a line, making certain rotational movements of the arm very difficult.
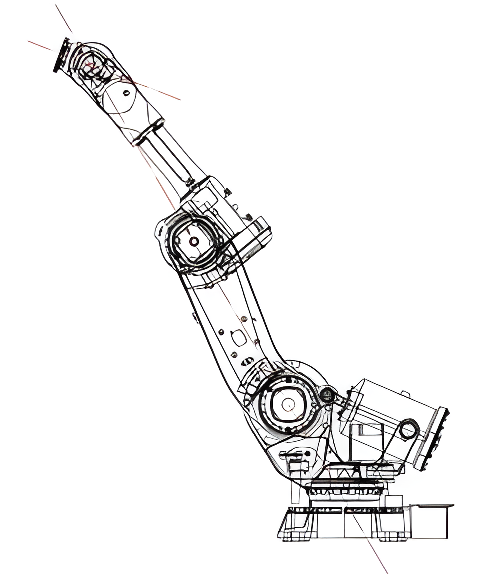
Elbow Singularity
When the robot wrist center and joint axes 2 and 3 are in the same plane, elbow singularity occurs. When the robot "elbow" - the second joint axis (J2) and third joint axis (J3) and wrist center point are coplanar and completely extended, the robot is similar to "arm stretched to the limit," causing the elbow to lock at a certain spatial position. At this time, the elbow’s rotational degrees of freedom disappear, making certain directions of end effector movement uncontrollable and causing inverse kinematics solutions to lose uniqueness. This situation is similar to when a person’s arm is completely extended, the elbow cannot bend further, and some movements are restricted.
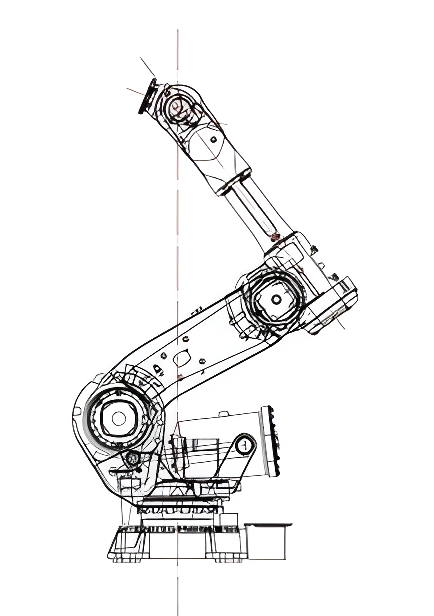
Wrist Singularity
When the robot’s two wrist axes (joint axes 4 and 6) are on the same straight line, wrist singularity occurs. When the robot wrist’s fourth joint axis (J4) and sixth joint axis (J6) are collinear, the wrist portion’s rotational degrees of freedom become coupled, making robot end effector orientation control difficult. At this time, small TCP movements may cause violent rotations of J4 and J6, and these joints may attempt to rotate 180 degrees immediately. This situation is similar to when a person’s wrist is completely twisted to the limit, certain rotations can only be completed by moving the entire arm.
Special Characteristics of Singularities
For shoulder and elbow singularities, they can be easily avoided by restricting robot working ranges. However, wrist singularities may occur at almost all positions in the robot workspace. When robots pass through these wrist singularities or their vicinity, the J4 and J6 axes in the robot wrist will perform large-rotation movements in short periods, causing robots to produce extremely unusual motion postures. If wrist axis operating speeds are restricted at this time, Tool Center Point (TCP) speeds will slow down, and robots will also deviate from taught operating trajectories.
Risks and Effects of Singularities
When robots move near singularities, the following risk situations occur:
-
Motion abnormalities: Near singularities, joint movements will show violent changes, causing robots to produce "jerky" or "non-humanlike" actions, affecting work safety and precision.
-
Trajectory deviation: TCP actual motion trajectories will deviate from preset paths, affecting execution quality of high-precision tasks such as welding and handling.
-
Control failure: In severe cases, joint speeds may tend toward infinity, causing servo system alarms, joint damage, or even safety accidents.
-
Inverse kinematics no solution/multiple solutions: Leading to path planning failures or execution abnormalities.
Engineering Countermeasures
-
Trajectory planning optimization: Avoid singularity areas in advance through trajectory planning during programming or simulation stages.
-
Motion range restrictions: Set physical or software limits for joints prone to singularities such as shoulders and elbows.
-
Real-time detection and alarm functions: Integrate singularity detection algorithms in robot control systems for real-time monitoring and alarms.
-
Singularity characteristic analysis: Optimize robot arm design or adjust process flows by analyzing robot structural parameters and task requirements.
-
Algorithm robustness design: Improve inverse kinematics and control algorithms to enhance fault tolerance for singularities.